9. hpm_motor library test demo
9.1. Depend on SDK1.10.0
9.2. introduction
In order to facilitate users to use and understand the functions of the motor library, a test demo is set up for the motor library.
Version 1.0 of the library contains only trajectory planning algorithms.
9.3. Sample
9.3.1. Define trajectory planning structure variables
CMDGENE_PARA cmdpar;
9.3.2. Define the position mode/speed mode
#define POS_MODE 1
9.3.3. Define an array of shift instructions and speed instructions
double poscmd[5000]={0};
double velcmd[5000]={0};
9.3.4. Define a 10ms timer
void timer_init(void)
{
gptmr_channel_config_t config;
gptmr_channel_get_default_config(BOARD_BLDC_TMR_MS, &config);
config.cmp[0] = BOARD_BLDC_TMR_RELOAD;
config.debug_mode = 0;
config.reload = BOARD_BLDC_TMR_RELOAD+1;
gptmr_enable_irq(BOARD_BLDC_TMR_MS, GPTMR_CH_CMP_IRQ_MASK(BOARD_BLDC_TMR_CH, BOARD_BLDC_TMR_CMP));
gptmr_channel_config(BOARD_BLDC_TMR_MS, BOARD_BLDC_TMR_CH, &config, true);
intc_m_enable_irq_with_priority(BOARD_BLDC_TMR_IRQ, 2);
}
9.3.5. Configure trajectory planning entry parameters
cmdpar.cmdgene_in_par.poscfgpar.q0 = 0;
cmdpar.cmdgene_in_par.poscfgpar.q1 = MOVE_BASOLUTE_POS_R;
cmdpar.cmdgene_in_par.poscfgpar.v0 = 0;
cmdpar.cmdgene_in_par.poscfgpar.v1 = 0;
cmdpar.cmdgene_in_par.poscfgpar.vmax = MOVE_SPEED;
cmdpar.cmdgene_in_par.poscfgpar.amax = MOVE_ACC;
cmdpar.cmdgene_in_par.poscfgpar.jmax = MOVE_JERK;
cmdpar.cmdgene_in_par.poscfgpar.cyclecnt = CYCLE_CNT;
cmdpar.cmdgene_in_par.poscfgpar.cycletype = MULTIPLE_MOVE_TYPE;
cmdpar.cmdgene_in_par.poscfgpar.dwelltime = DWELLTIME_MS;
cmdpar.cmdgene_in_par.poscfgpar.isr_time_s = ISR_TIME_S;
cmdpar.cmdgene_in_par.velcfgpar.q0 = 0;
cmdpar.cmdgene_in_par.velcfgpar.Tv = CONSTANT_SPEED_TIME_S;
cmdpar.cmdgene_in_par.velcfgpar.v0 = 0;
cmdpar.cmdgene_in_par.velcfgpar.v1 = 0;
cmdpar.cmdgene_in_par.velcfgpar.vmax =MOVE_SPEED;
cmdpar.cmdgene_in_par.velcfgpar.amax = MOVE_ACC;
cmdpar.cmdgene_in_par.velcfgpar.jmax = MOVE_JERK;
cmdpar.cmdgene_in_par.velcfgpar.isr_time_s = ISR_TIME_S;
9.3.6. Trajectory planning call function
void libcall(void)
{
#ifdef POS_MODE
pos_cmd_gene(&cmdpar);
#else
vel_cmd_gene(&cmdpar);
#endif
}
9.3.7. ISR
void isr_gptmr(void)
{
volatile uint32_t s = BOARD_BLDC_TMR_MS->SR;
BOARD_BLDC_TMR_MS->SR = s;
if (s & GPTMR_CH_CMP_STAT_MASK(BOARD_BLDC_TMR_CH, BOARD_BLDC_TMR_CMP))
{
libcall();
if(ii==5000)
{
return;
}
poscmd[ii] = cmdpar.cmdgene_out_par.poscmd;
velcmd[ii] = cmdpar.cmdgene_out_par.velcmd;
ii++;
}
}
SDK_DECLARE_EXT_ISR_M(BOARD_BLDC_TMR_IRQ, isr_gptmr)
9.3.8. DEMO
int main (void)
{
board_init();
lib_params_cfg();
timer_init();
}
9.4. Code Path
Code Path:lib_demo/software
9.5. Code Configuration
无
9.6. Code Build
Build for windows
9.7. Hardware
The hpm_6200_FourMotor_MB_RevA used in this routine
Users can use the others EVK board
9.8. Code Run
run the project
Save location instructions and speed instructions to local txt
excel graphics process

9.9. test content
9.9.1. speed mode,vel 10r/s,acc 100r/s/s,jerk 1000r/s/s/s
9.9.1.1. Code configuration
Comment out the macro definition POS_MODE in the libcmdtest.c file;
Change MOVE_SPEED to 10, MOVE_ACC to 100, and MOVE_JERK to 1000 in the libcmdtest.h file.
Observe the value of the velcmd array with the following test results:

9.9.2. speed mode,vel 10r/s,acc 10r/s/s,jerk 100r/s/s/s
9.9.2.1. Code configuration
Comment out the macro definition POS_MODE in the libcmdtest.c file;
Change MOVE_SPEED to 10, MOVE_ACC to 10, and MOVE_JERK to 100 in the libcmdtest.h file.
Observe the value of the velcmd array with the following test results:

9.9.3. position mode,vel 10r/s,acc 100r/s/s,jerk 1000r/s/s/s,absolute position 20,move mode:continuous round mode
9.9.3.1. Code configuration
Open macro definition POS_MODE in libcmdtest.c file;
Change MOVE_RABSOLUTE_POS_r in the libcmdtest.h file to 20, MOVE_SPEED to 10, MOVE_ACC to 100, and MOVE_JERK to 1000.
Change the value of cmdpar.cmdgene_in_par.poscfgpar.cycle in the lib_params_cfg function in the libcmdtest.c file to CONTINOUS_RONUD_MOVE_TYPE;
Observe the values of the velcmd and poscmd arrays with the following test results:

9.9.4. position mode,vel 10r/s,acc 100r/s/s,jerk 1000r/s/s/s,absolute position 20,move mode:single
9.9.4.1. Code configuration
Open macro definition POS_MODE in libcmdtest.c file;
Change MOVE_ABSOLUTE_POS_r in the libcmdtest.h file to 20, MOVE_SPEED to 10, MOVE_ACC to 100, and MOVE_JERK to 1000.
Change the value of cmdpar.cmdgene_in_par.poscfgpar.cycle in the libcmdtest.c file lib_params_cfg to SIGNLE_MOVE_TYPE;
Observe the values of the velcmd and poscmd arrays with the following test results:

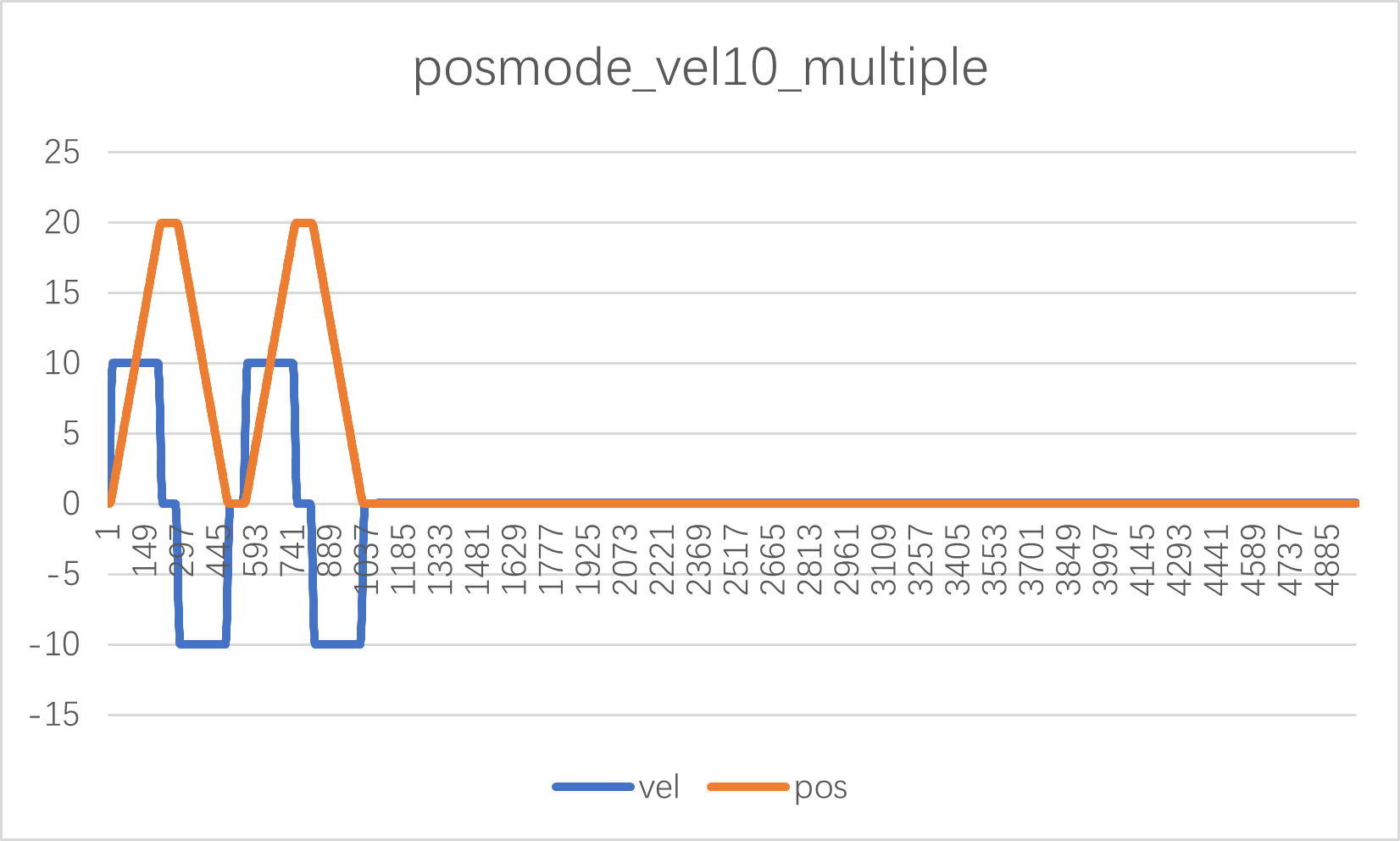
9.9.5. position mode,vel 10r/s,acc 100r/s/s,jerk 1000r/s/s/s,absolute position 20,move mode:multiple ,move cycle :2
9.9.5.1. Code configuration
Open macro definition POS_MODE in libcmdtest.c file;
Change MOVE_ABSOLUTE_POS_r in the libcmdtest.h file to 20, MOVE_SPEED to 10, MOVE_ACC to 100, MOVE_JERK to 1000, and CYCLE_CNT to 2.
Change the value of cmdpar.cmdgene_in_par.poscfgpar.cycle in the libcmdtest.c file lib_params_cfg to MULTIPLE_MOVE_TYPE;
Observe the values of the velcmd and poscmd arrays with the following test results: