1. hpm_motor LIB USER GUIDE
1.1. overview
hpm_motor is a library file for the core algorithm of motor control, which aims at modularized management of specific functional algorithms by constantly updating and improving; For users do not have to care about how to implement the underlying, accelerate the development of user programs.
The library is currently only supported for use in windows operating systems.
1.2. Installing the HPM MOTOR Library
1.2.1. hpm_motor library package contents
The Motor library consists of the following components:
Header file containing function declaration, macro declaration, structure declaration
Contains the.a file of the initial configuration function and the real-time running function
A demo example showing the use of HPM MOTOR library
Document
1.2.2. How to Install the HPM MOTOR Library
If you need to use some of the functions in the library, please first add the library to the project reference, the specific reference process is as follows:
(1)add the hpm motor file under the middleware branch

(2)project cite hpm motor library

(3)After opening the new project, you can see that the hpm_motor library is referenced by the project

(4)build project
The hpm_motor library file is used, and both gcc and andes toolchains are supported.
1.3. Library function description
The current 1.0 version of the library supports trajectory planning algorithm function interface calls, and other algorithm functions will be iteratively updated and improved. Before use, please call the version number function interface to obtain the version number and check with the version number displayed in the.a file.
1.3.1. Trajectory planning algorithm
There is a step in the speed of the motor when it is started and stopped. A sudden change in motor speed can cause current overload. Therefore, the acceleration and deceleration control algorithm is usually used to plan the motor speed.
The trajectory planning algorithm used in libhpm_motor.a is an S-shaped curve, the core of which is to control the change of acceleration through variable acceleration, ensure that acceleration does not mutate, and smooth the acceleration and deceleration speed curve, so as to achieve the purpose of smooth operation of the motor.
1.3.1.1. function
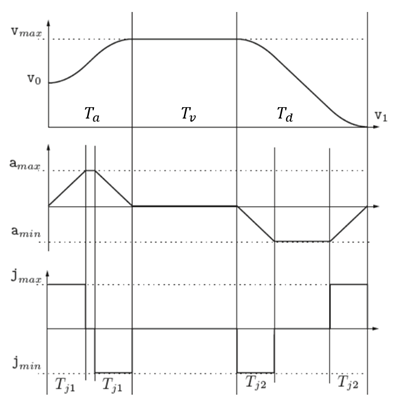
The S-shaped curve is mainly composed of acceleration section (T_a), uniform velocity section (T_v) and deceleration section (T_d). The acceleration section is further divided into acceleration (T_j1), uniform acceleration and deceleration (T_j1), and the deceleration section is divided into acceleration and deceleration (T_j2), uniform deceleration and deceleration (T_j2). There are seven sections in total, as shown in Figure 1, where v_max is the maximum acceleration of the system, v_0 is the start speed, v_1 is the end speed, and a_max is the maximum acceleration of the system. a_min is the maximum deceleration of the system, j_max is the maximum acceleration of the system, and j_min is the maximum deceleration of the system.
1.3.1.2. API description
(1)parameter
name |
note |
|
|---|---|---|
Trajectory generation configuration parameters CMDGENE_INPUT_PARA |
CMDGENE_POSCFG_PARA |
position mode |
Trajectory generation configuration parameters CMDGENE_INPUT_PARA |
CMDGENE_VELCFG_PARA |
velocity mode |
user variable |
CMDGENE_USER_PARA |
|
output params |
CMDGENE_OUTPUT_PARA |
pos/vel/acc/jerk array |
(2)structure member
structure |
note |
unit |
|
|---|---|---|---|
CMDGENE_POSCFG_PARA |
q0 |
start position |
unit |
CMDGENE_POSCFG_PARA |
q1 |
absolute position |
unit |
CMDGENE_POSCFG_PARA |
v0 |
start velocity ,set to 0 |
unit/s |
CMDGENE_POSCFG_PARA |
v1 |
end velocity ,set to 0 |
unit/s |
CMDGENE_POSCFG_PARA |
vmax |
max velocity |
unit/s |
CMDGENE_POSCFG_PARA |
amax |
max acc |
unit/s/s |
CMDGENE_POSCFG_PARA |
jmax |
max jerk |
unit/s/s/s |
CMDGENE_POSCFG_PARA |
cyclecnt |
cycle count |
|
CMDGENE_POSCFG_PARA |
cycletype |
motion type |
|
CMDGENE_POSCFG_PARA |
dwelltime |
dwell time |
ms |
CMDGENE_POSCFG_PARA |
isr_time_s |
The interrupt time for update position |
s |
CMDGENE_VELCFG_PARA |
q0 |
start position |
unit |
CMDGENE_VELCFG_PARA |
Tv |
constant speed |
s |
CMDGENE_VELCFG_PARA |
v0 |
start velocity ,set to 0 |
unit/s |
CMDGENE_VELCFG_PARA |
v1 |
end velocity ,set to 0 |
unit/s |
CMDGENE_VELCFG_PARA |
vmax |
max velocity |
unit/s |
CMDGENE_VELCFG_PARA |
amax |
max acc |
unit/s/s |
CMDGENE_VELCFG_PARA |
jmax |
max jerk |
unit/s/s/s |
CMDGENE_VELCFG_PARA |
isr_time_s |
The interrupt time for update velocity |
s |
CMDGENE_OUTPUT_PARA |
poscmd |
pos cmd |
unit |
CMDGENE_OUTPUT_PARA |
velcmd |
vel cmd |
unit/s |
CMDGENE_OUTPUT_PARA |
acccmd |
acc cmd |
unit/s/s |
note:uint set as r,count
(3)API
name |
note |
call state |
|---|---|---|
pos_cmd_gene |
position mode,update pos/vel array |
called in isr |
vel_cmd_gene |
speed mode,updatevel array |
called in isr |
cmd_gene_disable |
reset trajectory planning |
reset after trajectory planning end |
1.3.1.3. Steps to use the HPM MOTOR library
The trajectory planning algorithm is divided into five steps:
Step1: Add library headers. The C header file “libhpm_motor.h” contains the function declarations and structure declarations used by the library. Add the following line at the top of the main C file:
#include “libhpm_motor.h”
The.h file is under hpm_app\middleware\hpm_motor\inc.
Step2: Define the trajectory planning structure global variable in the {ProjectName}-Main.c file.
CMDGENE_PARA cmdpar=0;
Step3: The user assigns values to each member of the configuration parameter structure according to the operation mode, motion mode and motion parameter
cmdpar.cmdgene_in_par.poscfgpar.q0 = 0;
cmdpar.cmdgene_in_par.poscfgpar.q1 = 20;
cmdpar.cmdgene_in_par.poscfgpar.v0 = 0;
cmdpar.cmdgene_in_par.poscfgpar.v1 = 0;
cmdpar.cmdgene_in_par.poscfgpar.vmax = 10;
cmdpar.cmdgene_in_par.poscfgpar.amax = 100;
cmdpar.cmdgene_in_par.poscfgpar.jmax = 1000;
cmdpar.cmdgene_in_par.poscfgpar.cyclecnt = 1
cmdpar.cmdgene_in_par.poscfgpar.cycletype = 0;
cmdpar.cmdgene_in_par.poscfgpar.dwelltime = 500;
cmdpar.cmdgene_in_par.poscfgpar.isr_time_s = 1;
cmdpar.cmdgene_in_par.velcfgpar.q0 = 0;
cmdpar.cmdgene_in_par.velcfgpar.Tv = 5;
cmdpar.cmdgene_in_par.velcfgpar.v0 = 0;
cmdpar.cmdgene_in_par.velcfgpar.v1 = 0;
cmdpar.cmdgene_in_par.velcfgpar.vmax =10;
cmdpar.cmdgene_in_par.velcfgpar.amax = 100;
cmdpar.cmdgene_in_par.velcfgpar.jmax = 1000;
cmdpar.cmdgene_in_par.velcfgpar.isr_time_s = 1;
Step4: Call the corresponding trajectory planning function in the interrupt according to the running mode
In speed mode, the function vel_cmd_gene is called
In position mode, the function pos_cmd_gene is called
Step5: Reset trajectory planning
cmd_gene_disable
Call this function to reset the trajectory planning intermediate variable in order to once again plan the starting point, end point, and velocity of the PTP motion specified by the user.
1.3.1.4. config demo
In order to facilitate the use of this function more quickly, here is a record of some basic configuration under the speed curve, position curve for your reference, as shown in the following table.
operation mode |
absloute pos r |
vel r/s |
acc r/s/s |
jerk r/s/s/s |
Tv s |
motion type |
cycle cnt |
isr |
fig |
|---|---|---|---|---|---|---|---|---|---|
speed |
0 |
10 |
100 |
1000 |
1 |
/ |
/ |
1ms |
fig1 |
speed |
0 |
10 |
10 |
100 |
1 |
/ |
/ |
1ms |
fig2 |
position |
20 |
10 |
100 |
1000 |
/ |
0:continous |
/ |
1ms |
fig3 |
position |
20 |
10 |
100 |
1000 |
/ |
1:single |
/ |
1ms |
fig4 |
position |
20 |
10 |
100 |
1000 |
/ |
2:multiple |
2 |
1ms |
fig5 |
fig1

fig2
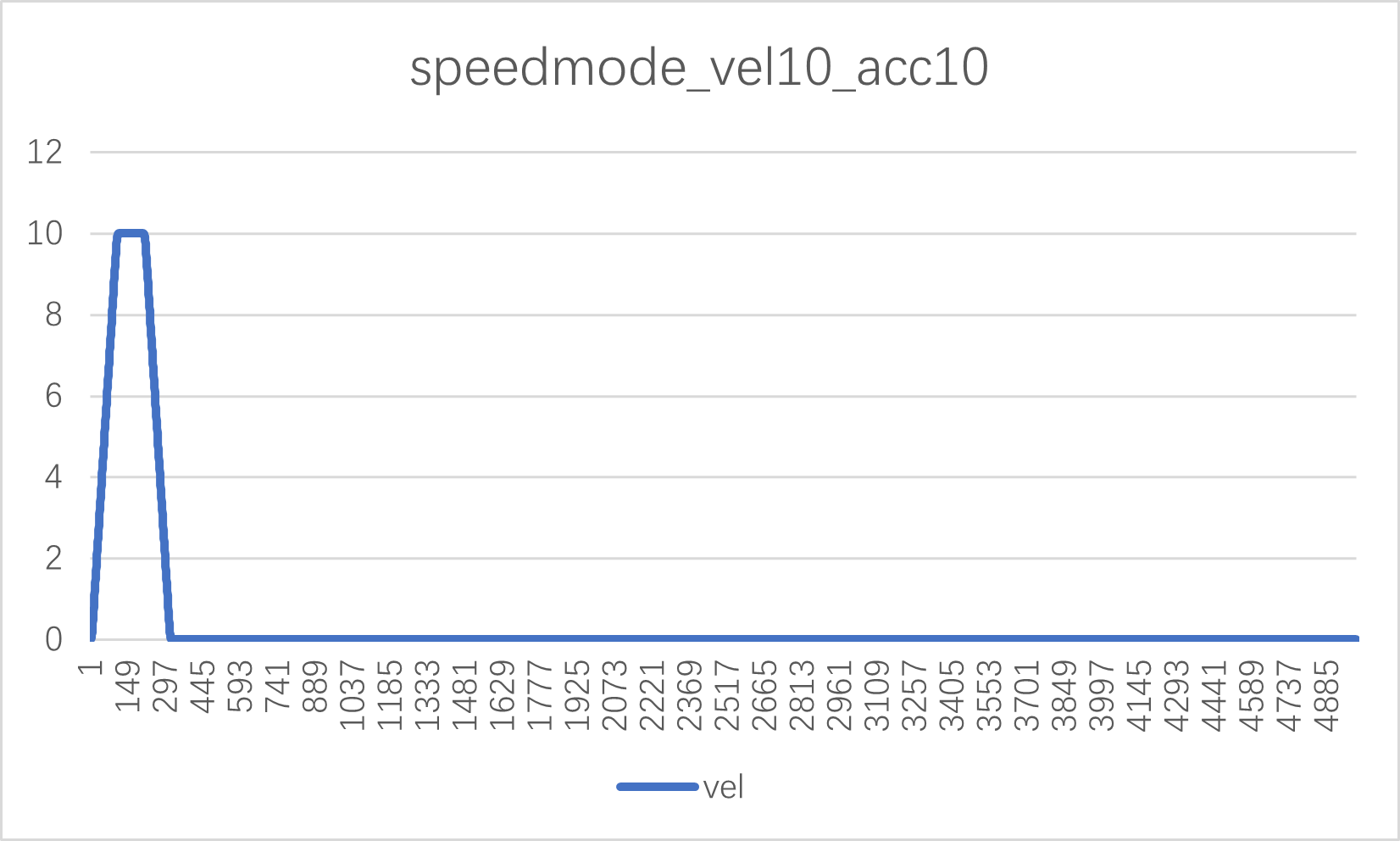
fig3

fig4

fig5

1.3.2. Inertia identification algorithm
In order to achieve good dynamic and static characteristics of servo control system, it is necessary to identify the moment of inertia and adjust the system control parameters. This library is mainly to explain the inertia identification principle, the implementation method, the principle please see:《hpm_motor库使用说明2.0》
Steps to use the library function:
1, before use, the motor driver needs to be set to speed mode, and the related variables of INTERIA_CalHdl need to be assigned:
INTERIA_CalHdl.INTERIA_InObj.flux = amplitude of permanent magnet flux; // Unit Wb
INTERIA_CalHdl.INTERIA_InObj.vel1 = 0.0000167* Maximum speed of the first acceleration stage (unit, r/min); // Can be set to 350r/min
INTERIA_CalHdl.INTERIA_InObj.cycle = 10; // The identification process is 10 consecutive acceleration and deceleration
INTERIA_CalHdl.INTERIA_InObj.interia_start = 1; //1: starting inertia identification, 0: not starting inertia identification
INTERIA_CalHdl.INTERIA_InObj.kk = 4; // The acceleration in the second stage is KK times the acceleration in the first stage
INTERIA_CalHdl.INTERIA_InObj.step = 500; // The unit is ms, each acceleration time is 500ms
INERTIA_CalObj.INTERIA_InObj.iq = three-phase permanent magnet synchronous motor Q-axis feedback current; // Unit: A
INERTIA_CalObj.INTERIA_InObj.speed_fdk = Feedback speed; // Unit, r/s
INERTIA_CalObj.INTERIA_InObj.poles = Number of three-phase permanent magnet synchronous motor poles; //
2, function call: interia_cal_process(&INERTIA_CalObj);
3, target speed = INERTIA_CalObj.INTERIA_UserObj.Vel_out*1000;//Unit:r/s
4, Storage variable of inertia result: INTERIA_CalHdl->INTERIA_OutObj.J, unit (𝑘𝑔 ∙ 𝑚2). // The premise is that inertia identification has been completed, that is, INERTIA_CalObj.INTERIA_OutObj.status = 0.