18. EtherCAT 主站
18.1. Depend on SDK1.10.0
18.2. Overview
This section is mainly based on the open-source EtherCAT master CherryECAT, demonstrating the EtherCAT master functionality running on HPMicro MCUs.
18.3. Feature
~ 4K ram, ~40K flash(24K + 16K shell cmd, including log)
Asynchronous queue-based transfer (one transfer can carry multiple datagrams)
Zero-copy technology: directly use enet tx/rx buffer to fill and parse ethercat data
Support hot-plugging
Automatic scanning bus
Automatic updating slave information when the topology changes
Support automatic monitoring slave status
Support distributed clocks
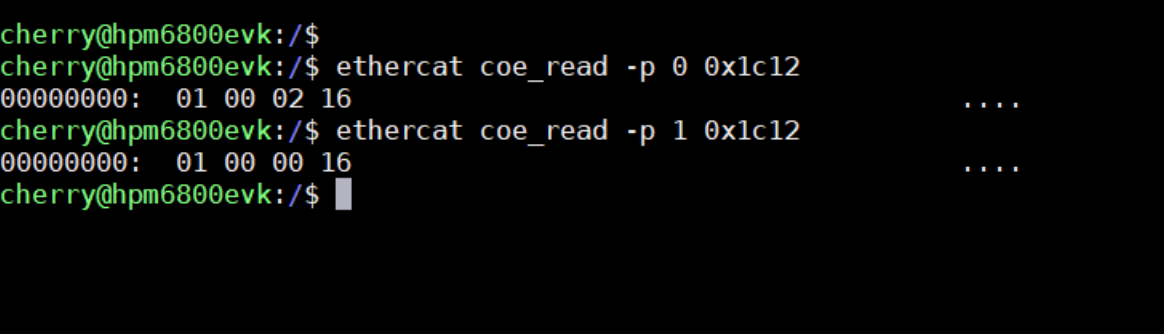
Support CANopen over EtherCAT(COE)
Support File over EtherCAT(FOE)
Support Ethernet over EtherCAT(EOE)
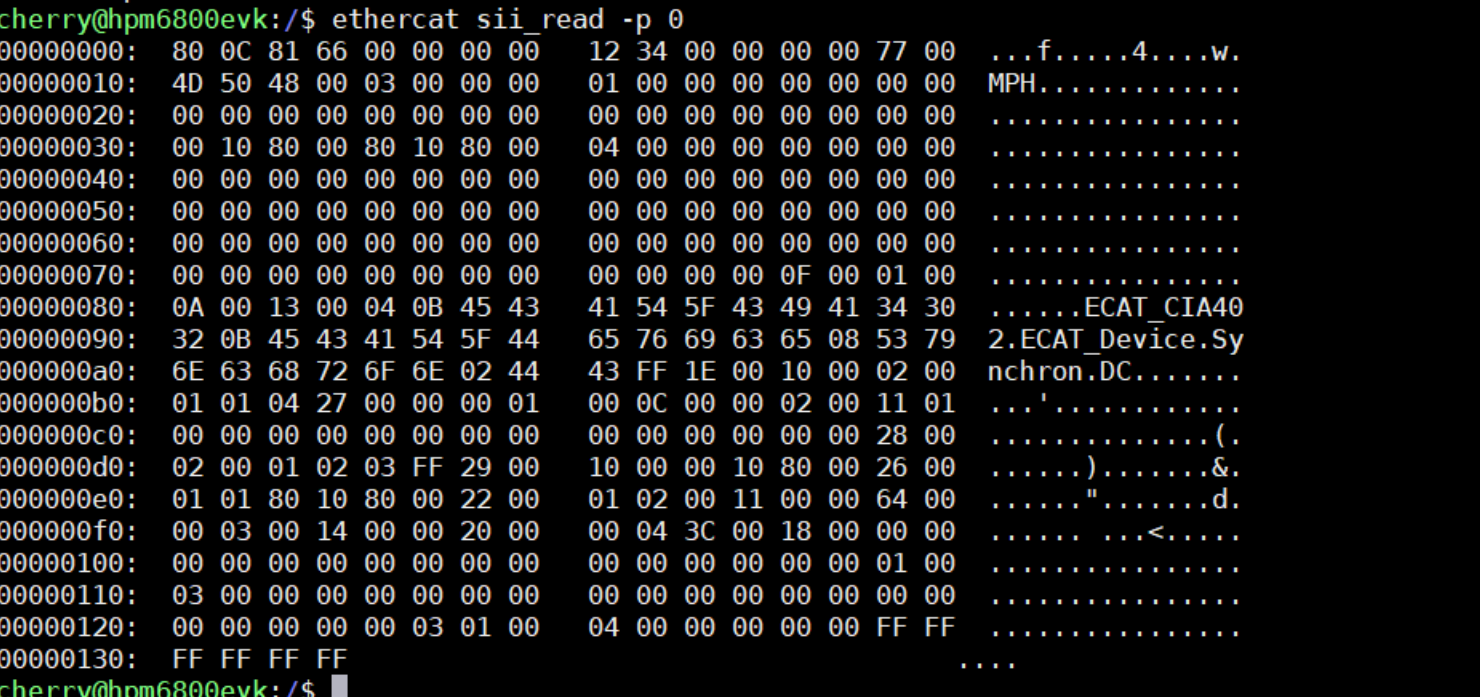
Support Slave SII access
Support Slave register access
Support multi master
Minimum PDO cyclic time < 40 us (depends on master and slave hardware)
DC jitter < 3us (depends on master and slave hardware)
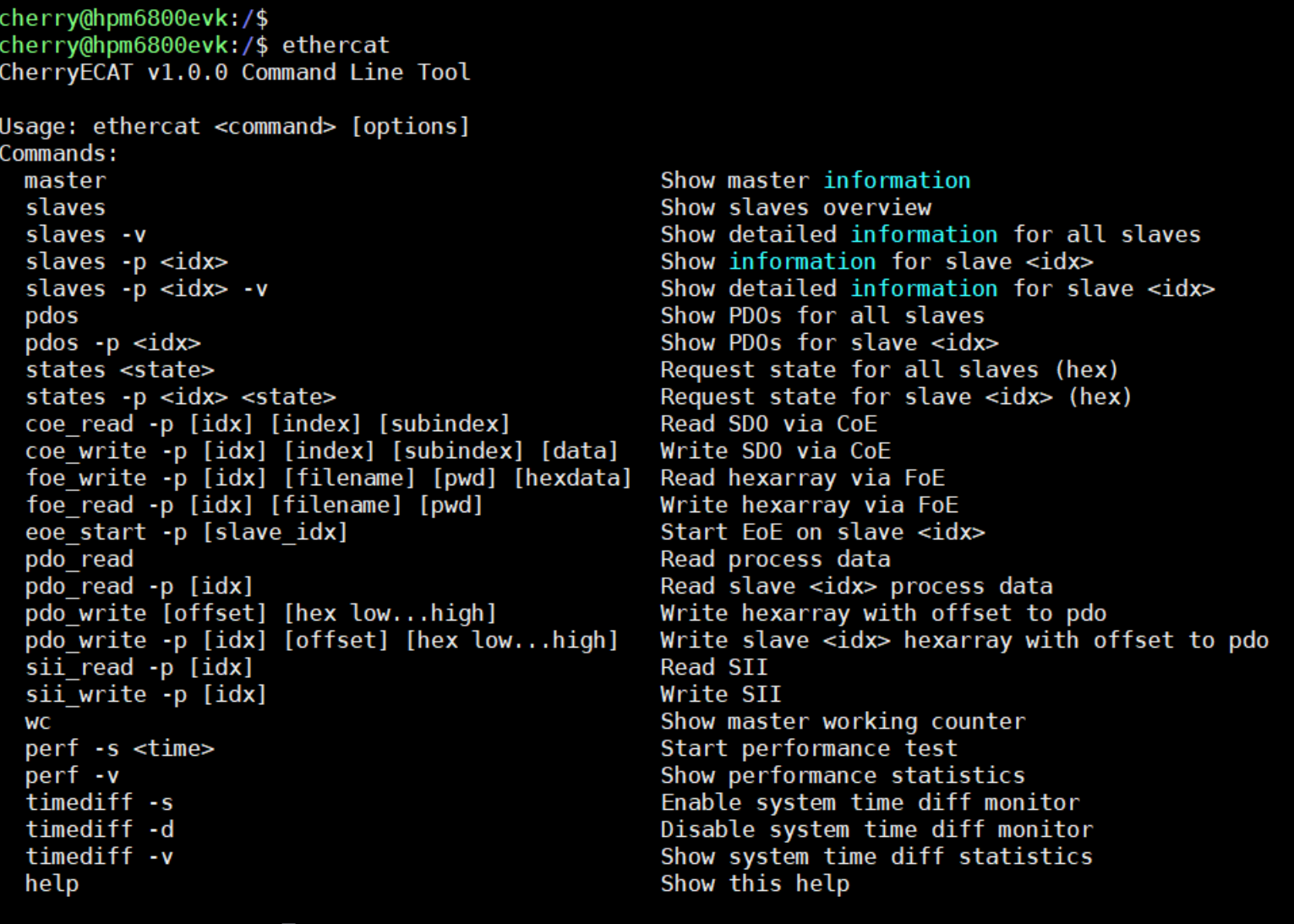
Support ethercat cmd with shell, ref to IgH
The pic shows dc jitter < 3us (hpm6800evk with flash_xip):

18.4. Running the example
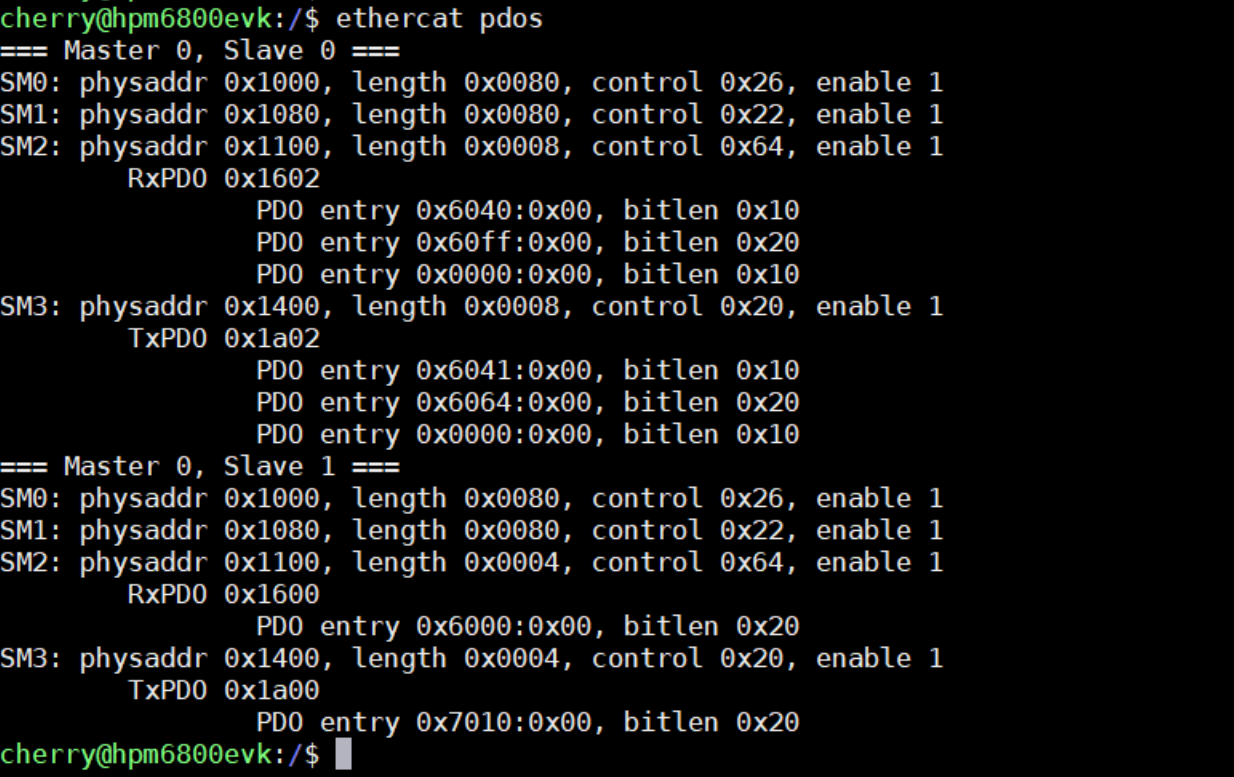
The default demo uses shell to test ethercat slave.
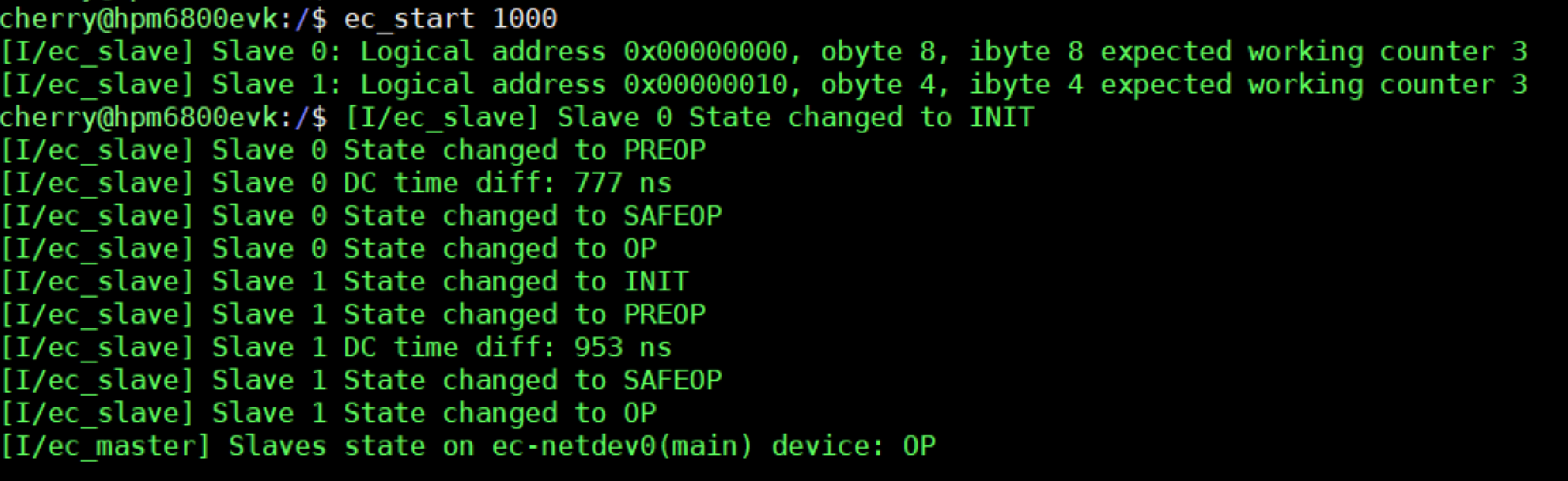
start pdo transfer with 1ms cycle
ec_start 1000
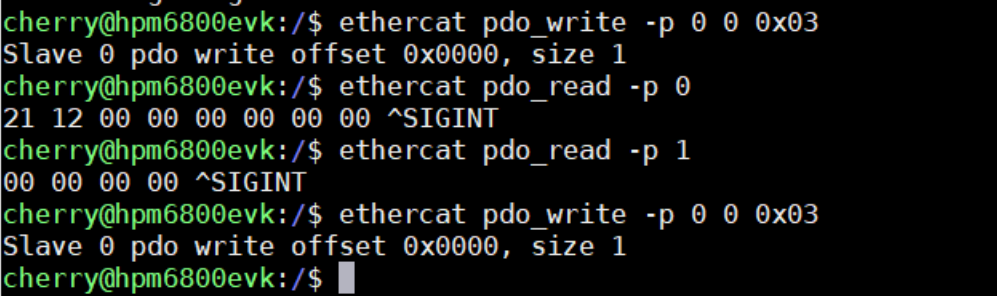
control led onoff with ecat_io demo
ethercat pdo_write -p 0 0 0x00
ethercat pdo_write -p 0 0 0x01
ethercat pdo_write -p 0 0 0x02
ethercat pdo_write -p 0 0 0x03
control motor in CSV mode with ecat_coe demo
ethercat pdo_write -p 0 0 0x0f // motor on
ethercat pdo_write -p 0 2 0xFF000000 // change ObjTargetVelocity to 255, hexdata from low byte to high byte
ethercat pdo_read -p 0 // get ObjStatusWord and ObjPositionActualValue
ethercat pdo_write -p 0 0 0x00 // motor off
18.5. API
Refer to CherryECAT API :https://cherryecat.readthedocs.io/zh-cn/latest/api.html