3. HPM电机外接SPI编码器方案
3.1. 依赖SDK1.10.0
3.2. 介绍
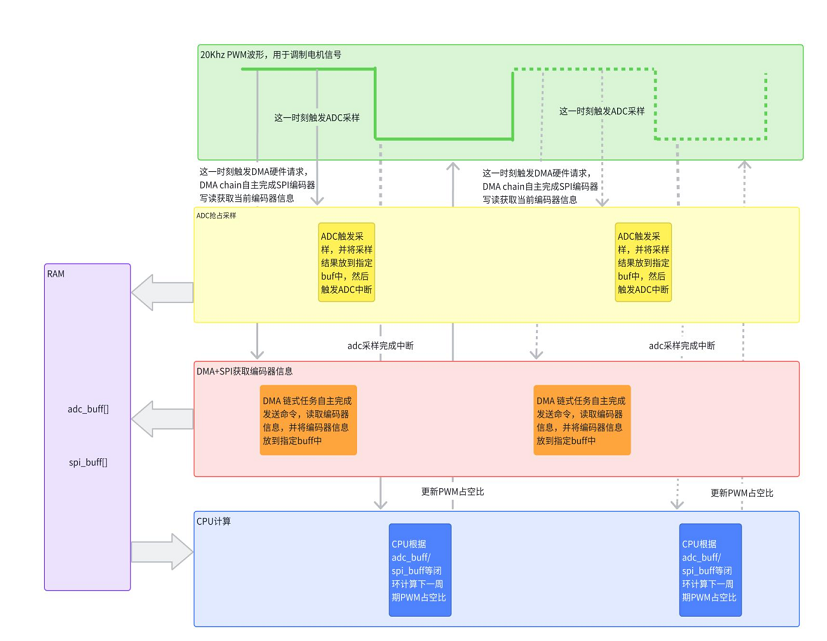
该方案通过PWM特定时刻触发ADC采样,同时在PWM另一特定时刻触发HDMA操作SPI控制器,并依靠HDMA链式模式,做成循环链表,由HDMA全自动完成SPI的读写任务,将读到的数据存放到指定内存中,无需CPU参与。
同时HPM ADC控制器也自带DMA,ADC采样完成后自带DMA将采样的数据存放到指定内存中,CPU也无需参与。
用户可直接在ADC采样完成中断中使用ADC采样结果及SPI编码器信息,去做后续闭环算法,最终调整下一周期PWM占空比。
DMA链式传输通常能够降低数据传输的延时以及将规则的连续任务由DMA自主完成。此方案中ADC抢占采样、DMA获取SPI编码器信息并行执行,从而减少了数据从源到目标的传输时间。这对于实时系统和需要快速响应的应用非常关键。
See the hpmicro.com site for more information about HPMicro
3.3. 应用文档
应用文档路径: HPM电机外接SPI编码器方案
3.4. 整体方案的功能框图
3.5. ADC抢占模式下的功能框图

3.6. DMA结合SPI获取编码器信息的功能框图

3.7. 例程
3.7.1. HDMA链表配置:
void hdma_spi_tx_chain_config(void)
{
dma_channel_config_t dma_ch_config;
static uint8_t dummy_cmd = 0xff;
static uint8_t dummy_buff1 = 0xff, dummy_buff2 = 0xff;
dma_default_channel_config(HPM_HDMA, &dma_ch_config);
/* SPI CTRL */
dma_ch_config.size_in_byte = 4;
dma_ch_config.src_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&spi_transctrl[0]);
dma_ch_config.dst_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&BOARD_APP_SPI_BASE->TRANSCTRL);
dma_ch_config.src_width = DMA_TRANSFER_WIDTH_WORD;
dma_ch_config.dst_width = DMA_TRANSFER_WIDTH_WORD;
dma_ch_config.src_burst_size = DMA_NUM_TRANSFER_PER_BURST_1T;
dma_ch_config.src_mode = DMA_HANDSHAKE_MODE_HANDSHAKE;
dma_ch_config.dst_mode = DMA_HANDSHAKE_MODE_HANDSHAKE;
dma_ch_config.src_addr_ctrl = DMA_ADDRESS_CONTROL_FIXED;
dma_ch_config.dst_addr_ctrl = DMA_ADDRESS_CONTROL_FIXED;
dma_ch_config.linked_ptr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&adc_descriptors1[1]);
dma_config_linked_descriptor(HPM_HDMA, &adc_descriptors1[0], 0, &dma_ch_config);
/* SPI CMD */
dma_ch_config.size_in_byte = 1;
dma_ch_config.src_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&dummy_cmd);
dma_ch_config.dst_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&BOARD_APP_SPI_BASE->CMD);
dma_ch_config.src_width = DMA_TRANSFER_WIDTH_BYTE;
dma_ch_config.dst_width = DMA_TRANSFER_WIDTH_BYTE;
dma_ch_config.src_burst_size = DMA_NUM_TRANSFER_PER_BURST_1T;
dma_ch_config.src_mode = DMA_HANDSHAKE_MODE_NORMAL;
dma_ch_config.dst_mode = DMA_HANDSHAKE_MODE_NORMAL;
dma_ch_config.src_addr_ctrl = DMA_ADDRESS_CONTROL_FIXED;
dma_ch_config.dst_addr_ctrl = DMA_ADDRESS_CONTROL_FIXED;
dma_ch_config.linked_ptr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&adc_descriptors1[2]);
dma_config_linked_descriptor(HPM_HDMA, &adc_descriptors1[1], 0, &dma_ch_config);
dma_ch_config.size_in_byte = sizeof(sendbuff);
dma_ch_config.src_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&sendbuff);
dma_ch_config.dst_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&BOARD_APP_SPI_BASE->DATA);
dma_ch_config.src_width = DMA_TRANSFER_WIDTH_BYTE;
dma_ch_config.dst_width = DMA_TRANSFER_WIDTH_BYTE;
dma_ch_config.src_burst_size = DMA_NUM_TRANSFER_PER_BURST_1T;
dma_ch_config.src_mode = DMA_HANDSHAKE_MODE_NORMAL;
dma_ch_config.dst_mode = DMA_HANDSHAKE_MODE_NORMAL;
dma_ch_config.src_addr_ctrl = DMA_ADDRESS_CONTROL_INCREMENT;
dma_ch_config.dst_addr_ctrl = DMA_ADDRESS_CONTROL_FIXED;
dma_ch_config.linked_ptr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&adc_descriptors1[3]);
dma_config_linked_descriptor(HPM_HDMA, &adc_descriptors1[2], 0, &dma_ch_config);
// dummy
dma_ch_config.size_in_byte = 64;
dma_ch_config.src_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&dummy_buff1);
dma_ch_config.dst_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&dummy_buff2);
dma_ch_config.src_width = DMA_TRANSFER_WIDTH_BYTE;
dma_ch_config.dst_width = DMA_TRANSFER_WIDTH_BYTE;
dma_ch_config.src_burst_size = DMA_NUM_TRANSFER_PER_BURST_1T;
dma_ch_config.src_mode = DMA_HANDSHAKE_MODE_NORMAL;
dma_ch_config.dst_mode = DMA_HANDSHAKE_MODE_NORMAL;
dma_ch_config.src_addr_ctrl = DMA_ADDRESS_CONTROL_FIXED;
dma_ch_config.dst_addr_ctrl = DMA_ADDRESS_CONTROL_FIXED;
dma_ch_config.linked_ptr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&adc_descriptors1[4]);
dma_config_linked_descriptor(HPM_HDMA, &adc_descriptors1[3], 0, &dma_ch_config);
// read
dma_ch_config.size_in_byte = sizeof(spi_buf);
dma_ch_config.src_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&BOARD_APP_SPI_BASE->DATA);
dma_ch_config.dst_addr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&spi_buf);
dma_ch_config.src_width = DMA_TRANSFER_WIDTH_BYTE;
dma_ch_config.dst_width = DMA_TRANSFER_WIDTH_BYTE;
dma_ch_config.src_burst_size = DMA_NUM_TRANSFER_PER_BURST_1T;
dma_ch_config.src_mode = DMA_HANDSHAKE_MODE_NORMAL;
dma_ch_config.dst_mode = DMA_HANDSHAKE_MODE_NORMAL;
dma_ch_config.src_addr_ctrl = DMA_ADDRESS_CONTROL_FIXED;
dma_ch_config.dst_addr_ctrl = DMA_ADDRESS_CONTROL_INCREMENT;
dma_ch_config.linked_ptr = core_local_mem_to_sys_address(HPM_CORE0, (uint32_t)&adc_descriptors1[0]);
dma_config_linked_descriptor(HPM_HDMA, &adc_descriptors1[4], 0, &dma_ch_config);
}
3.7.2. PWM两个触发源配置:
#define PWM_FREQUENCY (20000)
#define PWM_RELOAD (clock_get_frequency(clock_mot0) / PWM_FREQUENCY - 1) /*20K hz = 200 000 000/PWM_RELOAD */
void init_trigger_source(PWM_Type *ptr)
{
pwm_cmp_config_t pwm_cmp_cfg;
pwm_cmp_config_t pwm_cmp_cfg_spi[2];
pwm_output_channel_t pwm_output_ch_cfg;
/* 需要去配置好PWM 时钟源 和 divider */
pwm_set_reload(ptr, 0, PWM_RELOAD);
/* 选择比较器 */
memset(&pwm_cmp_cfg, 0x00, sizeof(pwm_cmp_config_t));
pwm_cmp_cfg.enable_ex_cmp = false;
pwm_cmp_cfg.mode = pwm_cmp_mode_output_compare;
pwm_cmp_cfg.update_trigger = pwm_shadow_register_update_on_shlk;
/* 选择comp8并在pwm周期的中间触发 */
pwm_cmp_cfg.cmp = 2999;
pwm_config_cmp(ptr, APP_ADC16_PMT_PWM_REFCH_A, &pwm_cmp_cfg);
pwm_cmp_cfg_spi[0].enable_ex_cmp = false;
pwm_cmp_cfg_spi[0].mode = pwm_cmp_mode_output_compare;
pwm_cmp_cfg_spi[0].update_trigger = pwm_shadow_register_update_on_shlk;
pwm_cmp_cfg_spi[0].cmp = 4999;
pwm_config_cmp(ptr, APP_ADC16_PMT_PWM_REFCH_A + 1, &pwm_cmp_cfg_spi[0]);
pwm_enable_dma_request(HPM_PWM0, PWM_IRQ_CMP(9));
/* 影子寄存器 */
pwm_issue_shadow_register_lock_event(APP_ADC16_PMT_PWM);
/* 设置比较器通道以产生触发信号 */
pwm_output_ch_cfg.cmp_start_index = APP_ADC16_PMT_PWM_REFCH_A; /* 输出通道比较开始索引 */
pwm_output_ch_cfg.cmp_end_index = APP_ADC16_PMT_PWM_REFCH_A; /* 输出通道比较结束索引 */
pwm_output_ch_cfg.invert_output = false;
pwm_config_output_channel(ptr, APP_ADC16_PMT_PWM_REFCH_A, &pwm_output_ch_cfg);
/* 启动比较器计数器 */
pwm_start_counter(ptr);
}
3.7.3. 根据不同SPI编码器,写入相应数据:
void prepare_spi_sent_data(void)
{
sendbuff[0] = 0xA0;
sendbuff[1] = 0x03;
}
3.7.4. ADC中断中可以直接使用读回来的spi_buf:
void isr_adc16(void)
{
uint32_t status;
status = adc16_get_status_flags(BOARD_APP_ADC16_BASE);
if (ADC16_INT_STS_TRIG_CMPT_GET(status))
{
/* 清除 trig_cmpt 状态位 */
adc16_clear_status_flags(BOARD_APP_ADC16_BASE, adc16_event_trig_complete);
/* 设置读取内存数据的标志 */
trig_complete_flag = 1;
// 使用spi_buf
// spi_buf[x]
}
}
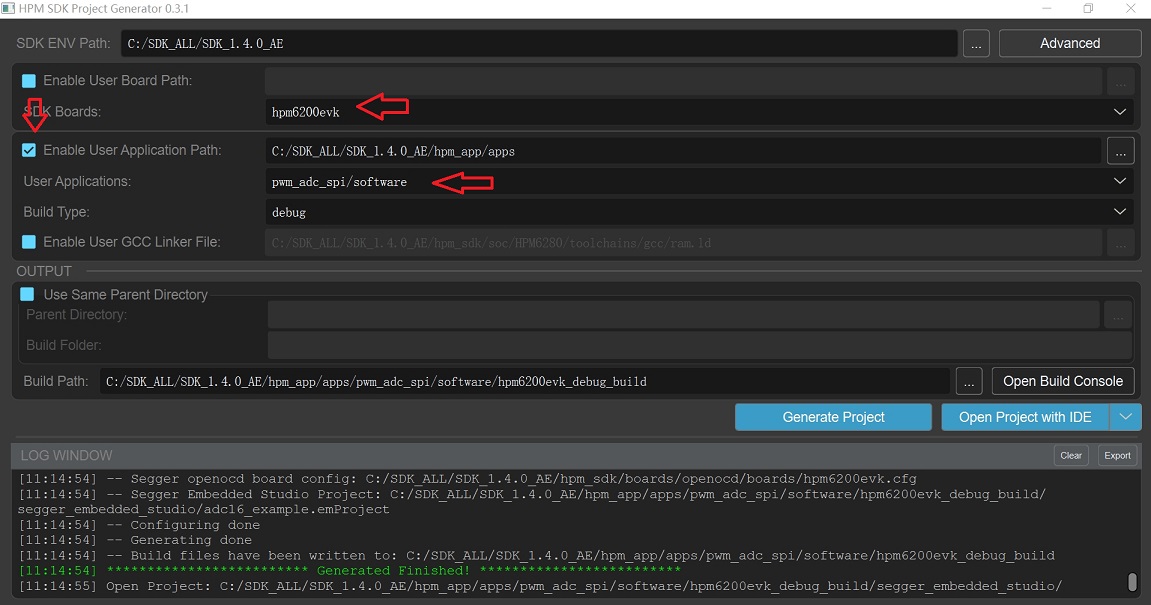
3.8. 工程路径
工程路径:pwm_adc_spi/software/
3.9. 工程配置
无
3.10. 工程构建
windows下工程构建
3.11. 硬件设置
本方案使用电机外接编码器进行测试。
用户自行使用可以验证SPI读写功能的设备既可,注意修改SPI初始化配置。
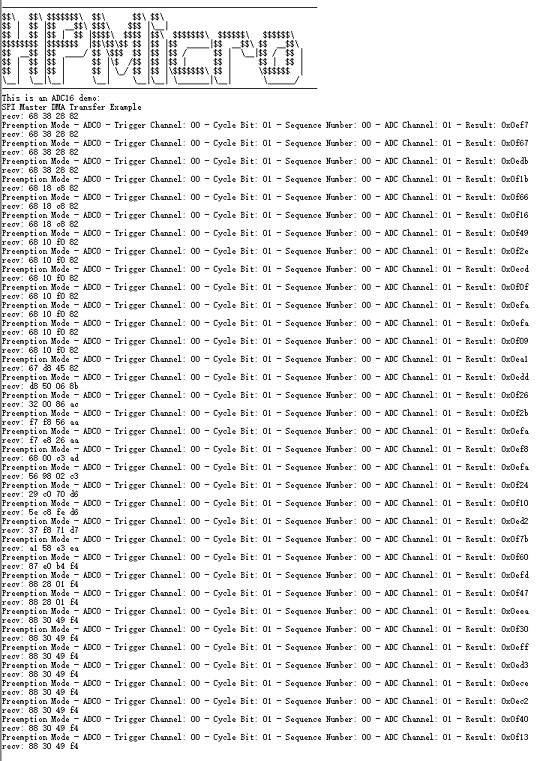
3.12. 工程运行
在程序主循环中可以打印spi_buf的值
运行工程
旋转电机,可以看到SPI编码器获取到的信息随之更新,ADC采样信息也一起更新
如下所示: