24. EtherCAT 主站显控一体电机控制方案
24.1. 依赖SDK 1.11.0
24.2. 概述
本方案基于先楫半导体HPM系列MCU,结合EtherCAT主站技术和LVGL图形界面,实现了一套完整的EtherCAT主站电机控制解决方案。
本方案集成了以下核心功能:
EtherCAT主站:基于开源 CherryECAT 实现的工业级EtherCAT主站
CIA402电机控制:支持CSP(位置控制)、CSV(速度控制)运动控制模式
LVGL图形界面:提供直观的触摸屏控制界面,实时显示电机状态和运动参数
FreeRTOS实时操作系统:确保电机控制的实时性和稳定性
命令行交互:支持Shell命令行调试和配置
24.3. 核心特性
24.3.1. EtherCAT主站特性
异步队列式传输:一次传输可携带多个datagram
零拷贝技术:直接使用以太网TX/RX缓冲区
热插拔支持:自动扫描总线,拓扑变化时自动更新从站信息
自动状态监控:实时监控从站状态
24.3.2. 电机控制特性
CIA402标准协议:符合工业标准的电机控制接口
多种控制模式:
CSP(位置控制模式)
CSV(速度控制模式)
设备切换:支持多台电机设备的切换控制
实时反馈:位置、速度、状态实时显示
故障诊断:连接状态监测和错误提示
24.3.3. UI界面特性
现代化设计:基于LVGL v9的流畅触摸界面
速度控制:弧形滑块调节目标速度
位置控制:弧形滑块调节目标位置
实时波形:Chart图表显示运动曲线
设备管理:支持多设备选择和状态显示
按钮控制:启动/停止、正转/反转快捷操作
24.4. 硬件要求
24.4.1. 主控板要求
MCU: HPM6800EVK
显示屏: 1280x800分辨率触摸屏
以太网: 支持EtherCAT通信的以太网接口
调试接口: JTAG/SWD调试接口
串口: UART串口
24.4.2. 从站设备要求
支持CIA402协议的EtherCAT伺服驱动器
24.5. 软件架构
24.5.1. 系统框架
┌─────────────────────────────────────────┐
│ LVGL UI Layer │
│ (触摸控制 + 实时显示 + 中文界面) │
└─────────────┬───────────────────────────┘
│
┌─────────────┴───────────────────────────┐
│ Application Layer │
│ (CIA402控制逻辑 + 数据处理) │
└─────────────┬───────────────────────────┘
│
┌─────────────┴───────────────────────────┐
│ CherryECAT Master │
│ (PDO通信 + DC同步 + 状态机管理) │
└─────────────┬───────────────────────────┘
│
┌─────────────┴───────────────────────────┐
│ FreeRTOS + Ethernet Driver │
│ (任务调度 + 网络驱动) │
└─────────────────────────────────────────┘
24.5.2. 任务结构
LVGL Task: 界面刷新和触摸事件处理
EtherCAT Task: PDO周期性通信和状态监控
Shell Task: 命令行交互和调试
24.6. 设备连接
24.6.1. 硬件连接示意图
[PC调试工具] ──USB──> [HPM主控板] ──JTAG──> [调试器]
│
│ EtherCAT
├──> [伺服驱动器1] ──> [电机1]
│
├──> [伺服驱动器2] ──> [电机2]
│
└──> [伺服驱动器N] ──> [电机N]
24.6.2. 连接步骤
连接PC USB到主控板的DEBUG Type-C接口
连接调试器到JTAG接口
连接EtherCAT从站设备(伺服驱动器)
连接电机到伺服驱动器
连接显示屏到主控板(如使用UI界面)
上电启动系统
24.7. 端口设置
串口波特率: 115200bps
停止位: 1
校验位: 无
数据位: 8
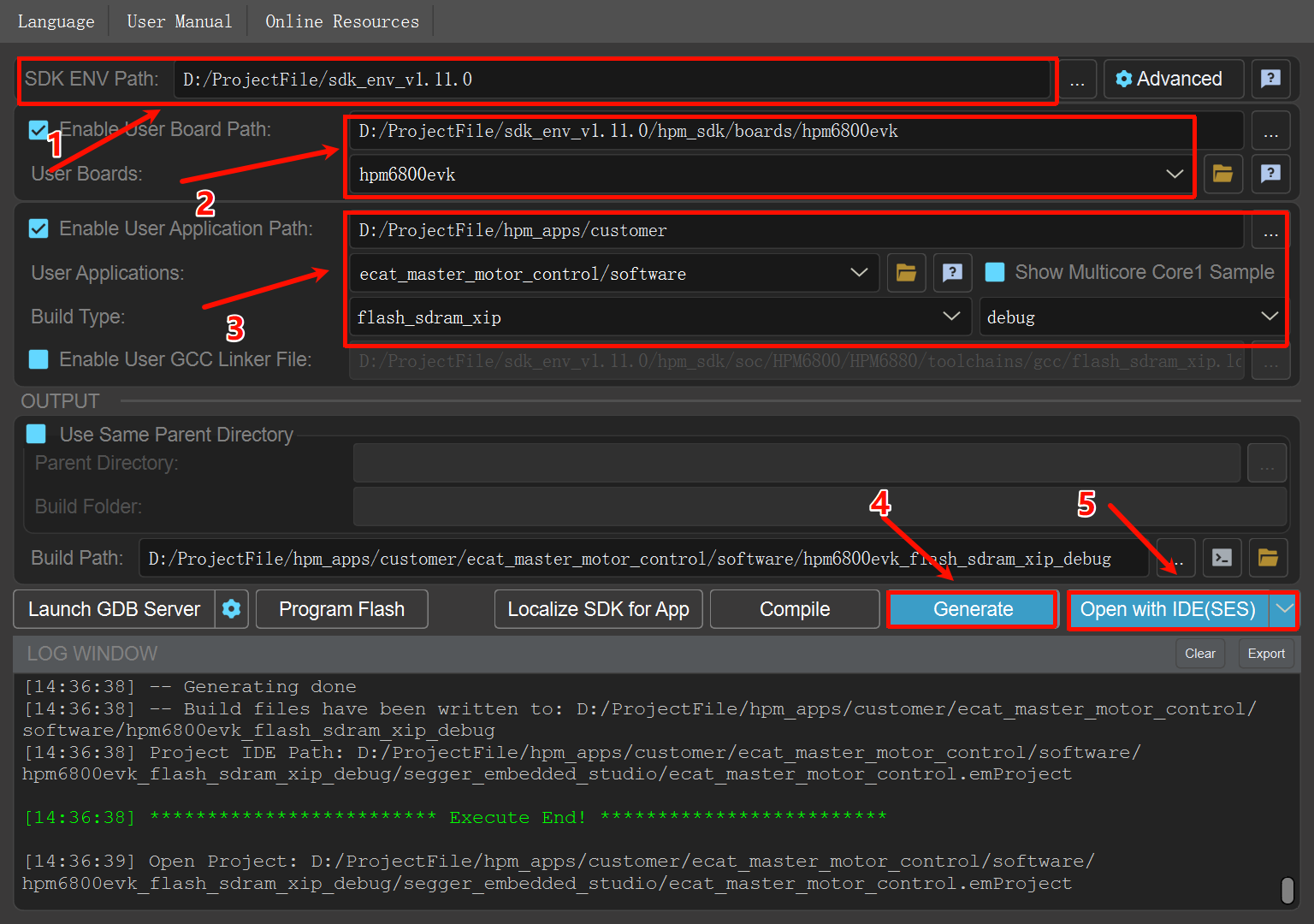
24.8. 创建工程
24.9. 运行现象
24.9.1. 系统启动
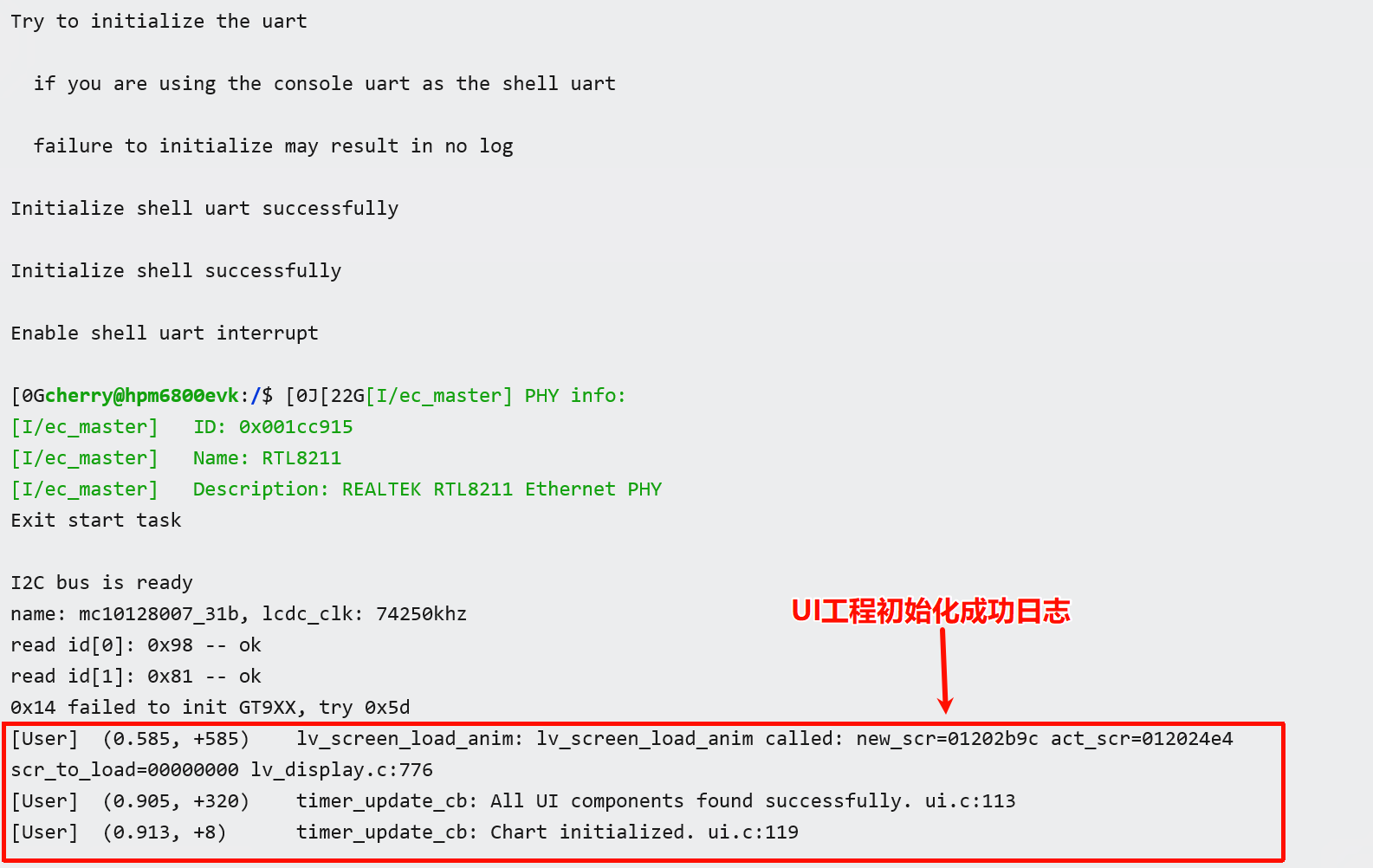
24.9.1.1. 工程初始化成功串口日志(未连接从设备时):
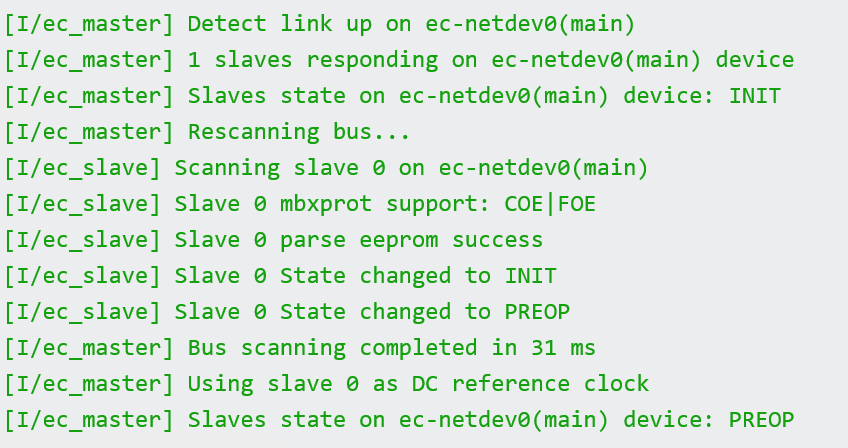
24.9.1.2. 从机设备连接成功串口日志:
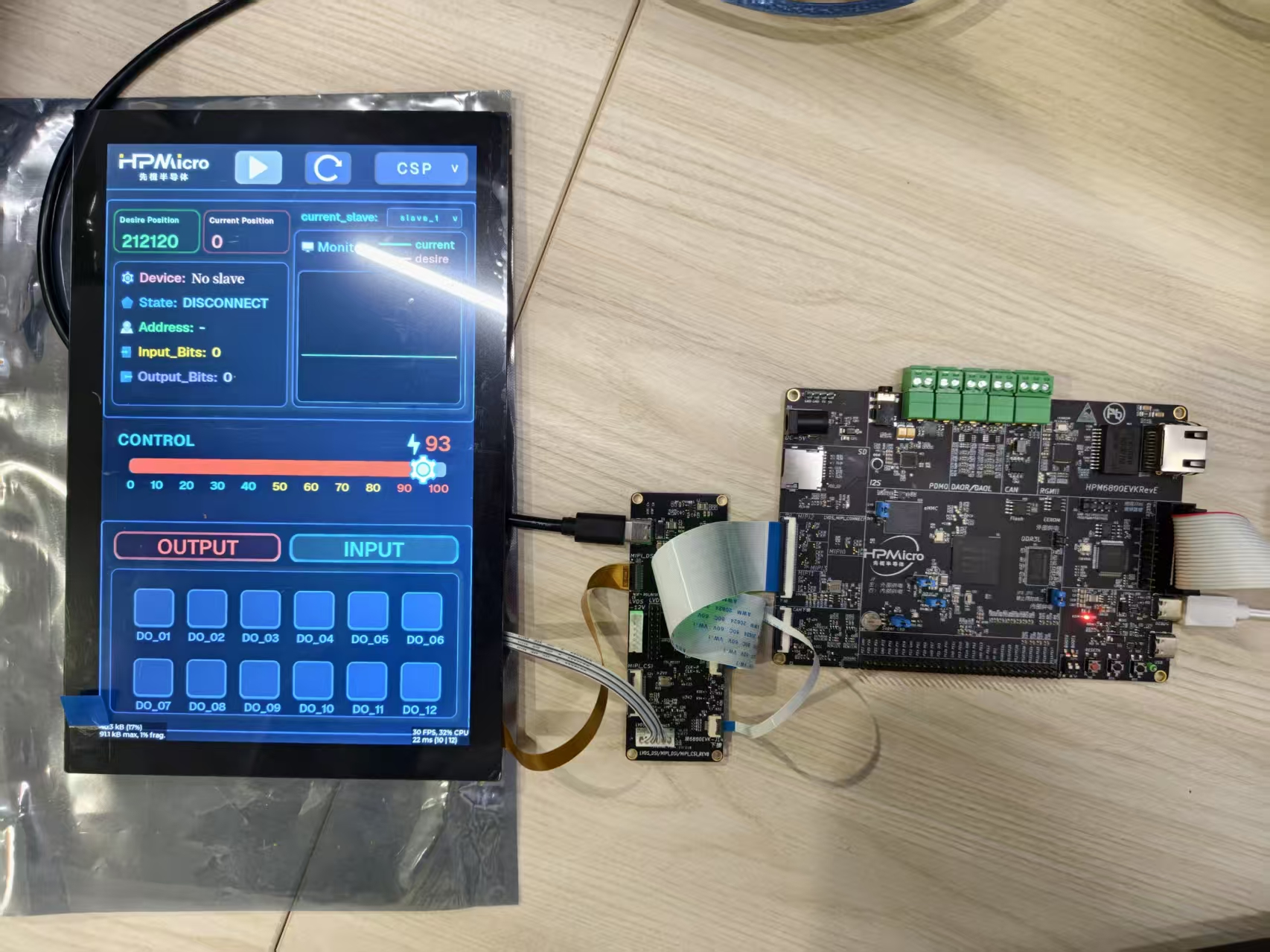
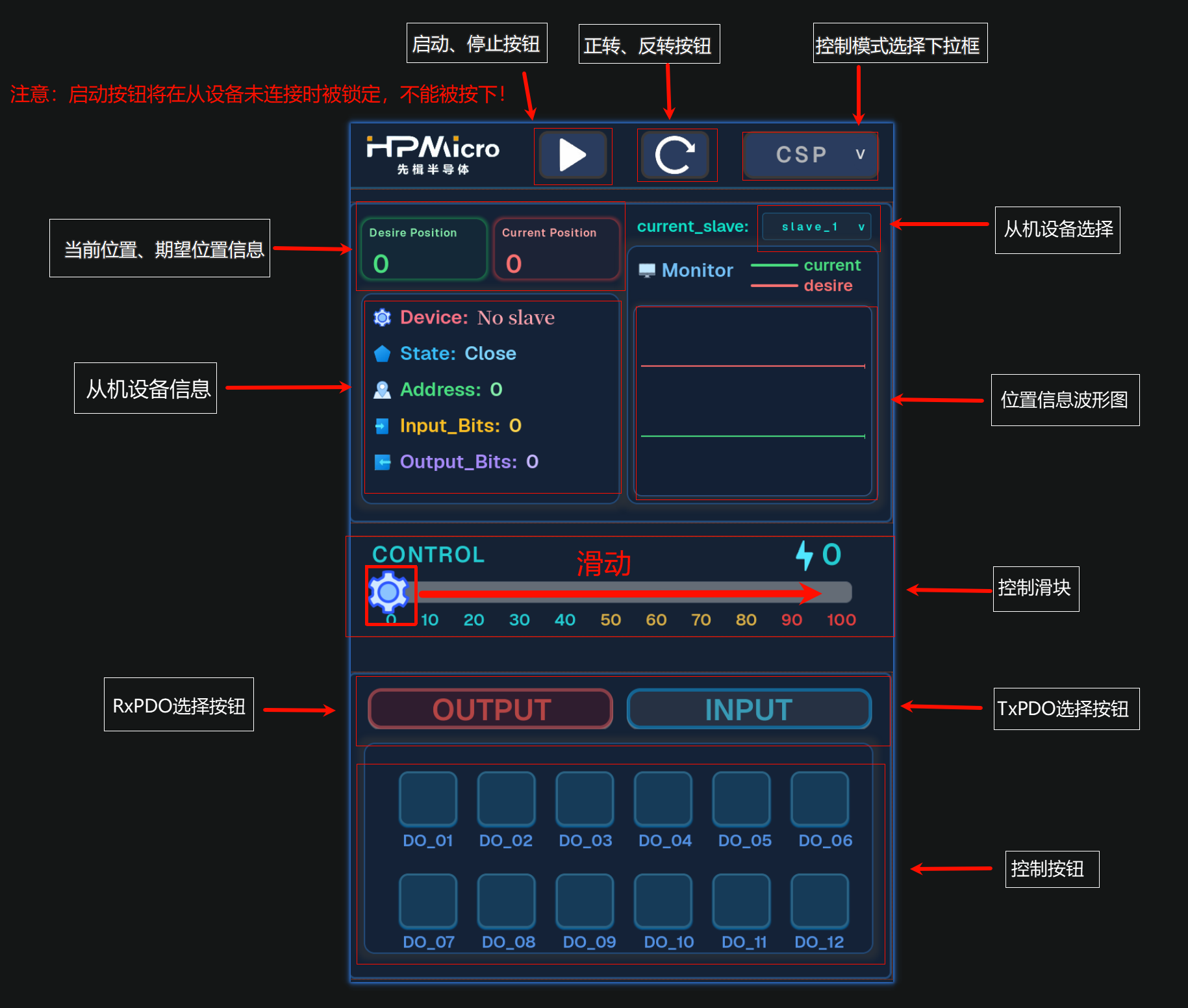
24.9.2. UI界面显示
触摸屏会显示电机控制界面,包含以下元素:
顶部状态栏:
HPMicro logo
启动按钮
正转、反转按钮
控制模式下拉框
设备信息模块:
控制区域:
可拖动调节滑块(0-100)
向右滑动可控制速度或位置
实时数值显示
底部In/Output控制按钮:
INPUT模式选择按钮
OUTPUT模式选择按钮
12个位输入/输出按钮
24.10. 功能特性
24.10.1. 1. 设备管理
自动扫描EtherCAT总线上的所有从站
支持热插拔检测
支持多设备切换控制
实时显示设备数量和当前选择
24.10.2. 2. 控制互斥
速度控制和位置控制互斥(速度模式和位置模式同时只能选择一个)
界面自动切换显示对应从设备信息
24.10.3. 3. 视觉反馈
按钮按下有视觉反馈
期望值和实际值的波形颜色不同,分开显示
24.10.4. 4. 数据采集
波形图实时显示电机运动状态
实时显示从设备状态信息