18. EtherCAT 主站
18.1. 依赖SDK1.10.0
18.2. 概述
本节主要基于开源 ethercat 主站 CherryECAT,演示在先楫 MCU 上运行 ethercat 主站功能。
18.3. 特性
~ 4K ram,~40K flash(24K + 16K shell cmd, including log)
异步队列式传输(一次传输可以携带多个 datagram)
零拷贝技术:直接使用 enet tx/rx buffer 填充和解析 ethercat 数据
支持热插拔
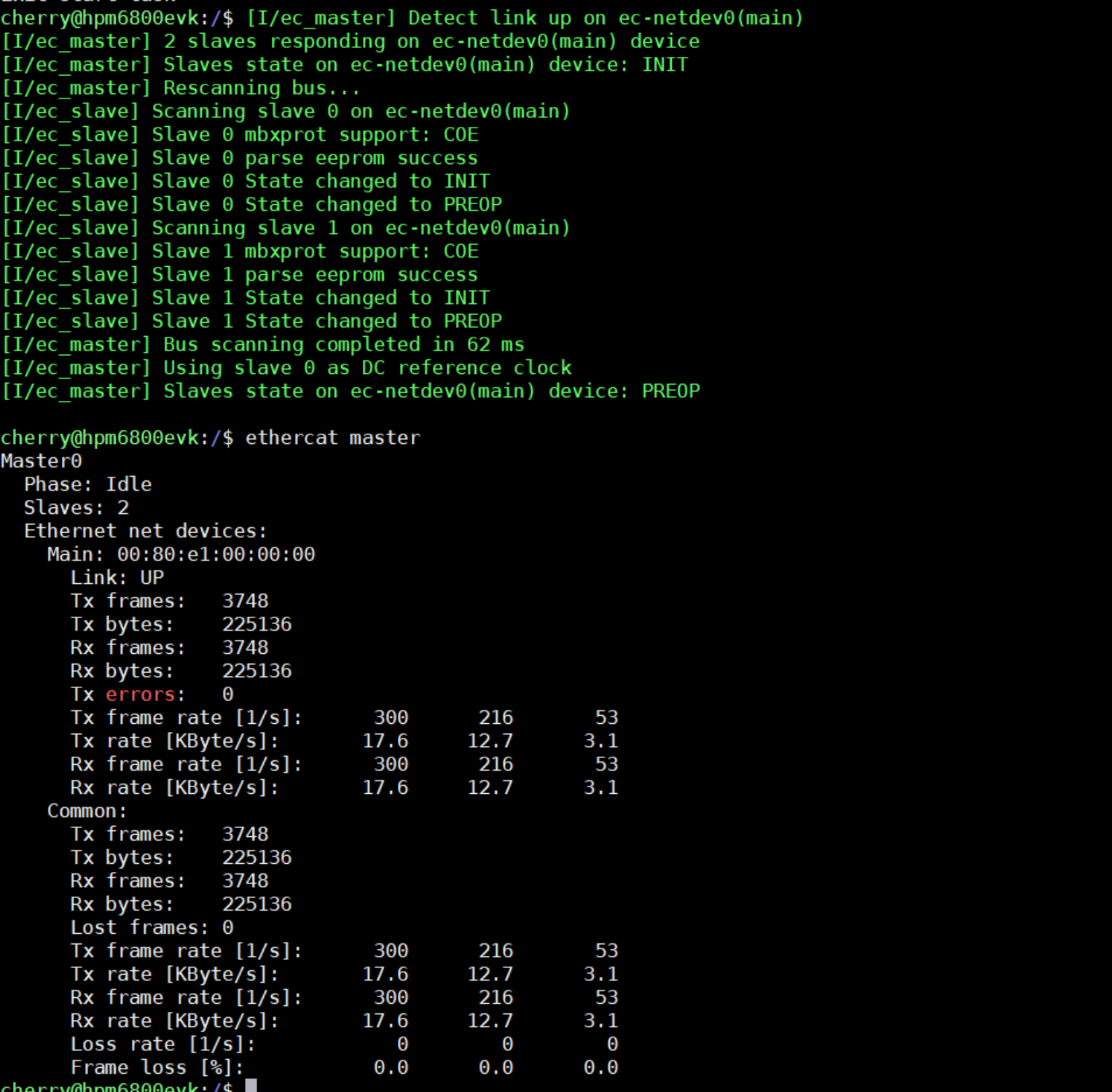
自动扫描总线
拓扑结构发生变化时自动更新 Slave 信息
支持自动监控 Slave 状态
支持分布式时钟
支持 CANopen over EtherCAT (COE)
支持 File over EtherCAT(FOE)
支持 Ethernet over EtherCAT(EOE)
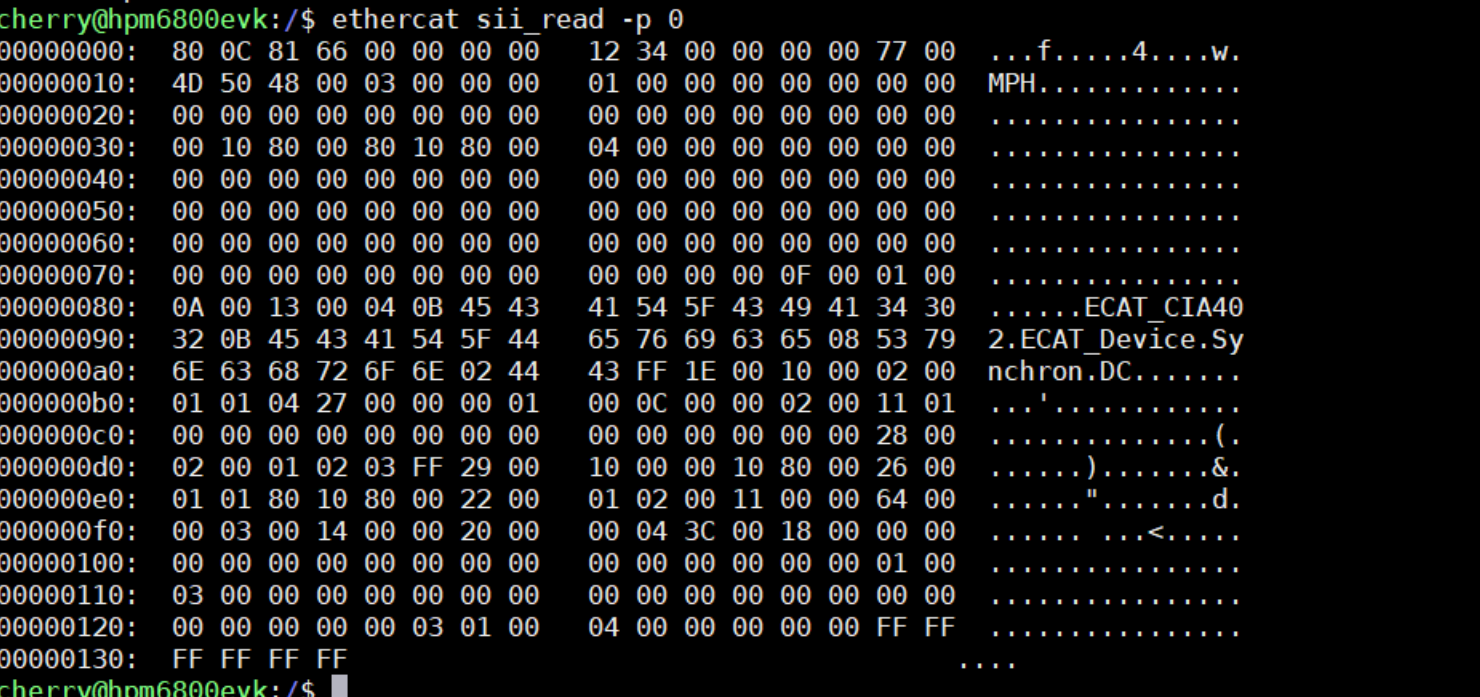
支持 Slave SII 读写
支持 Slave 寄存器读写
支持多主站
最小 PDO cyclic time < 40 us (实际数值受主站硬件和从站硬件影响)
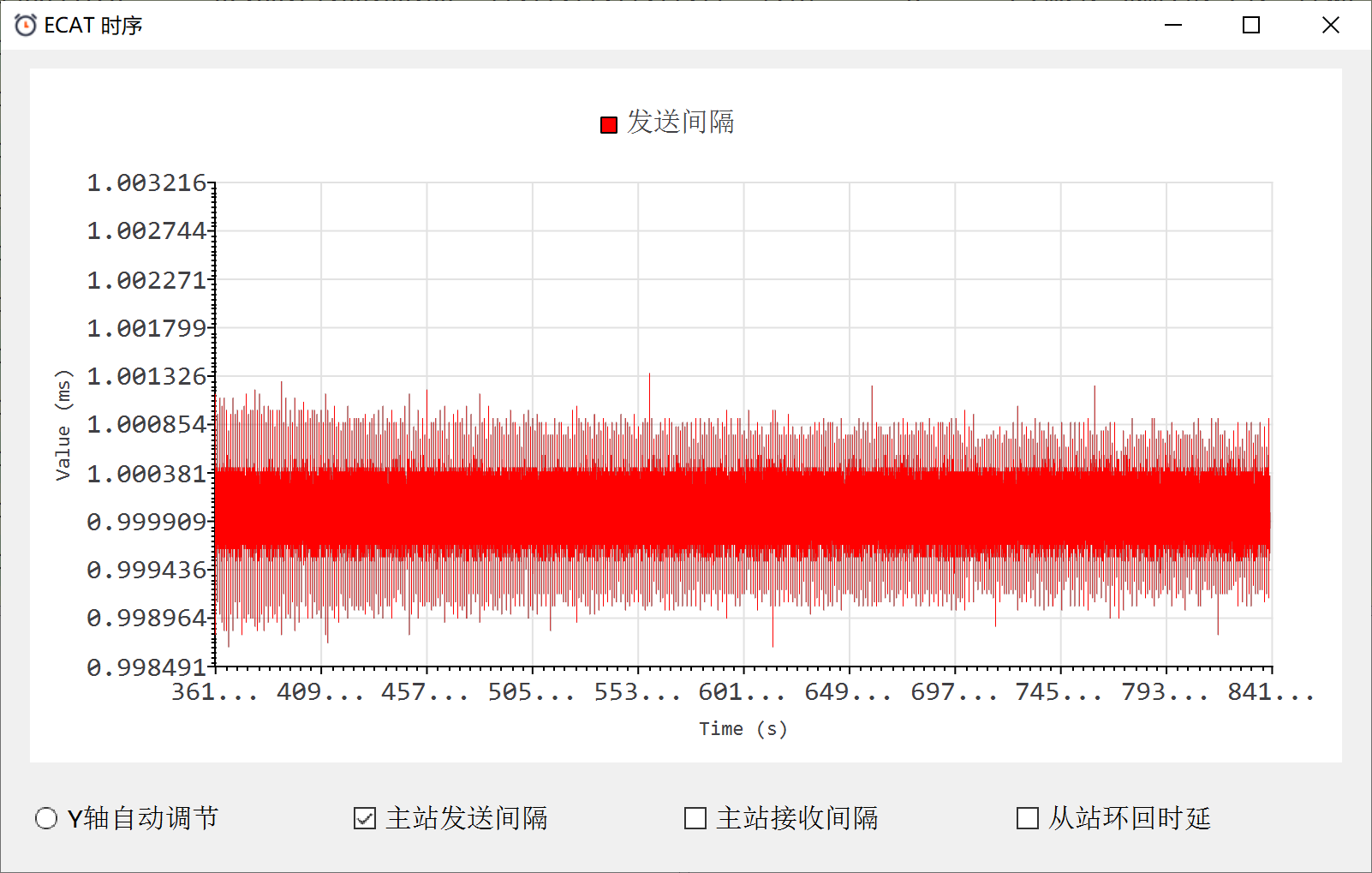
DC 抖动 < 3us (实际数值受主站硬件和从站硬件影响)
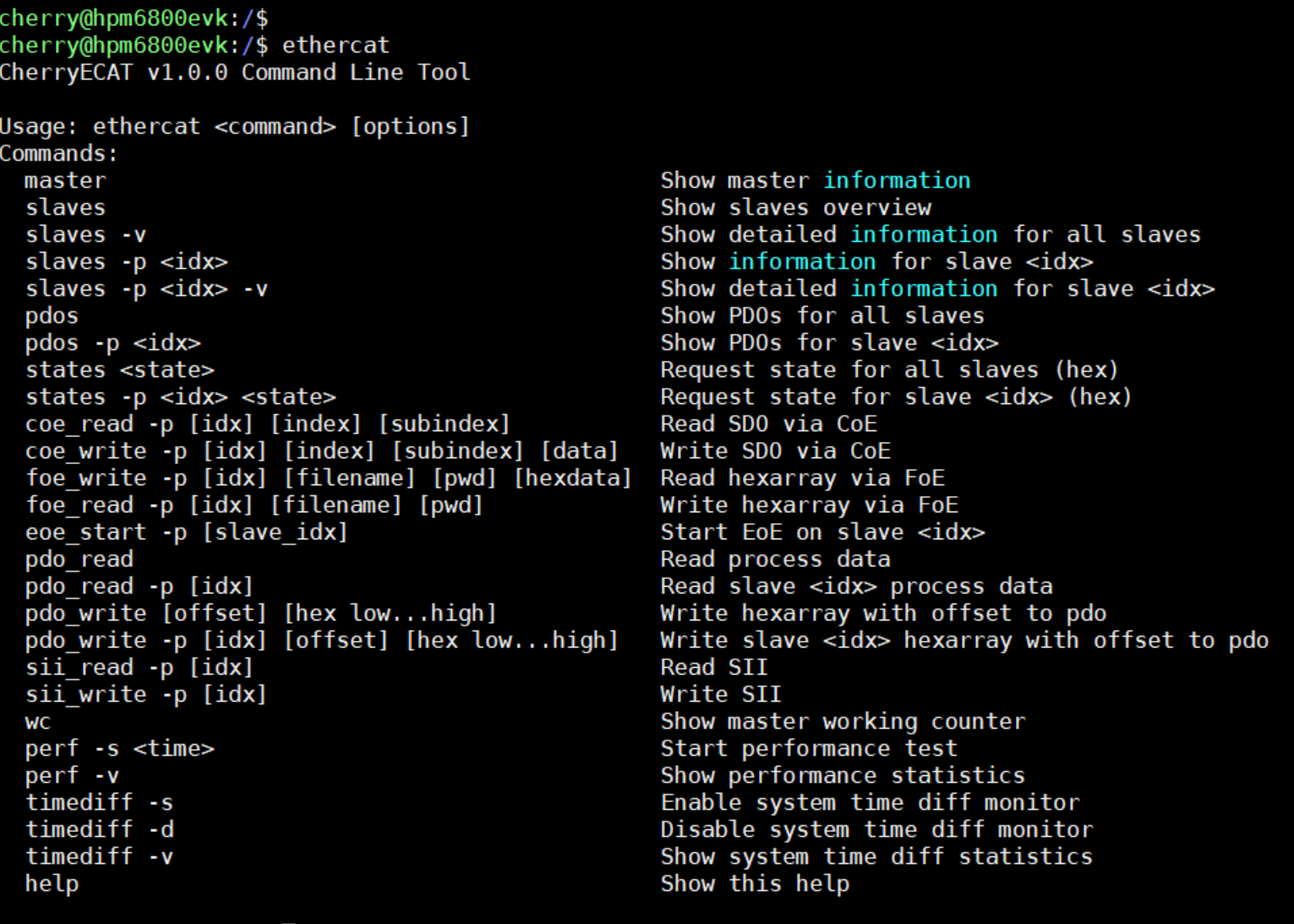
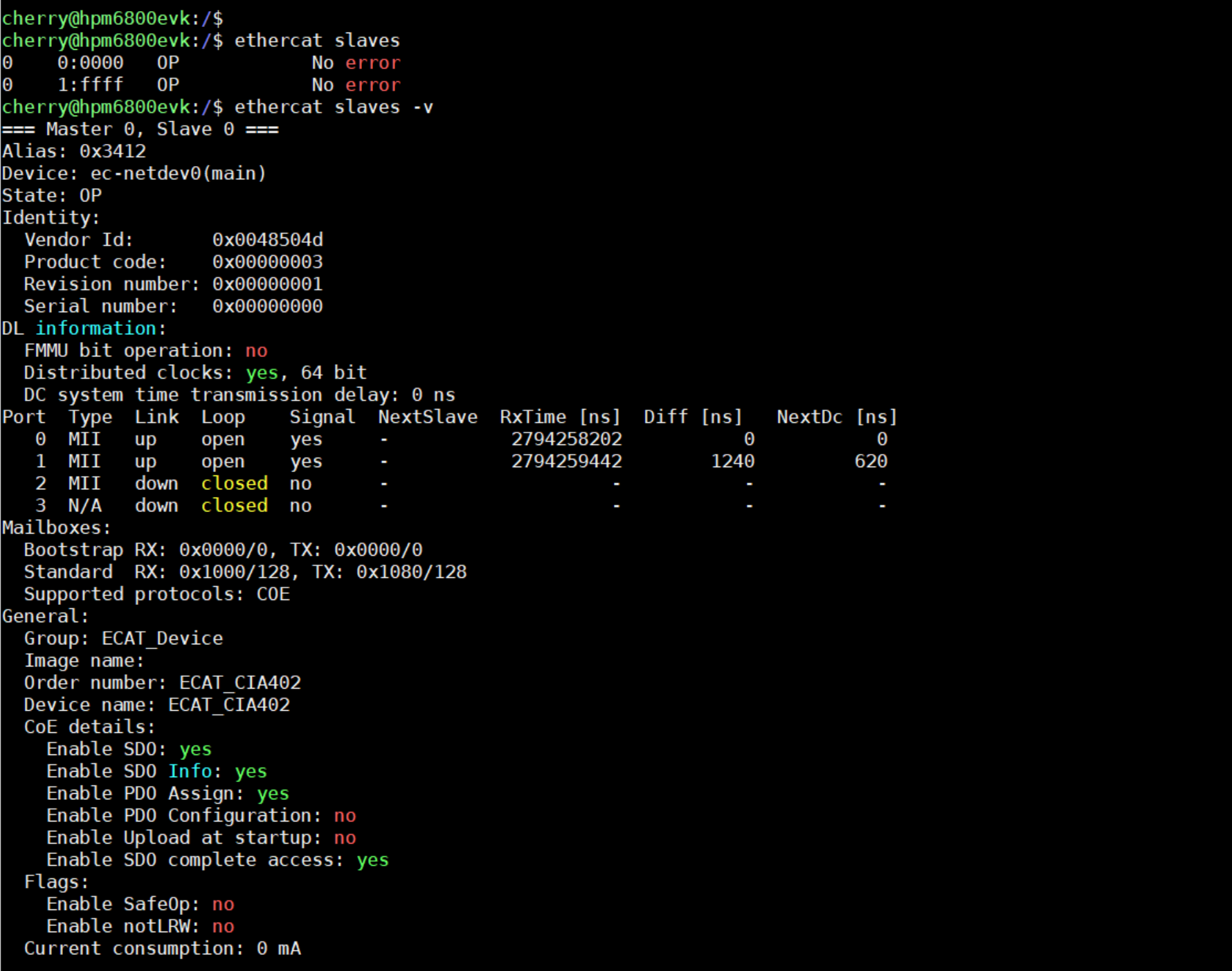
支持 ethercat 命令行交互,参考 IgH
下图展示 dc 抖动 < 3us (hpm6800evk + flash_xip):
18.4. 运行现象
默认 demo 使用命令行来操作 ethercat 从站的功能。
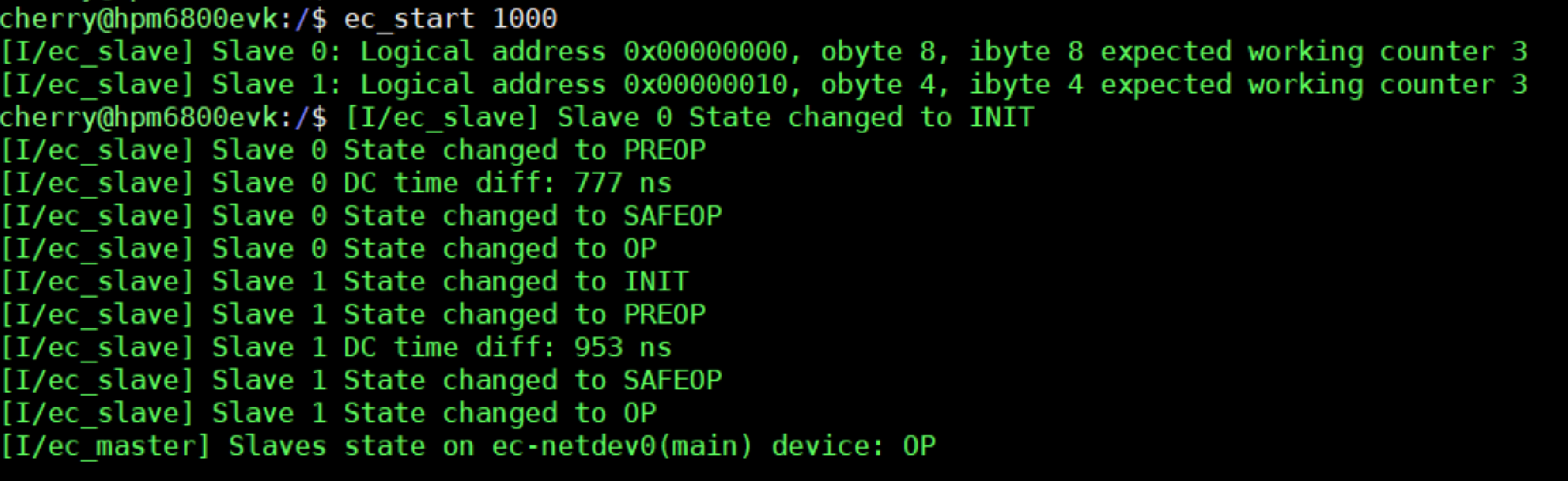
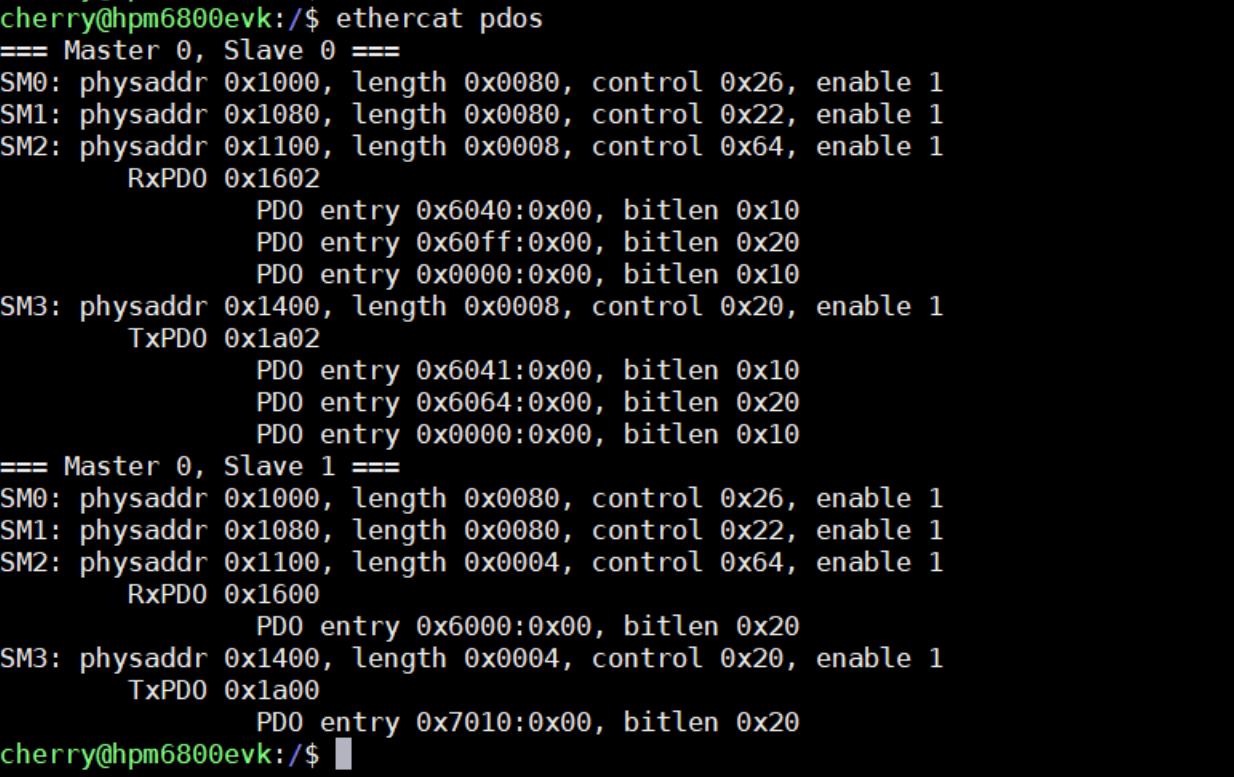
启动 pdo 1ms 周期性传输
ec_start 1000
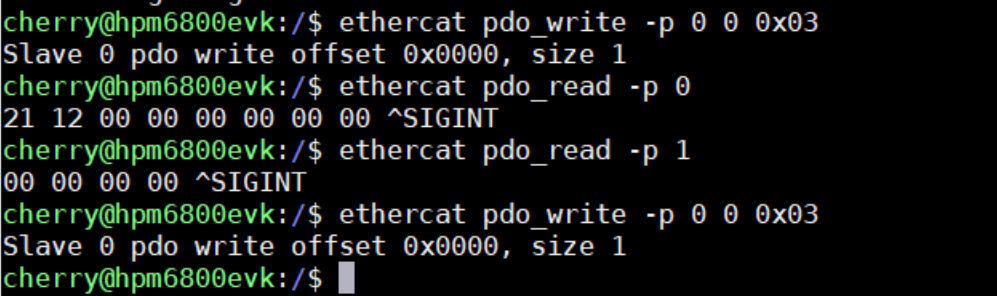
搭配 ecat_io 例程控制 LED 开启和关闭
ethercat pdo_write -p 0 0 0x00
ethercat pdo_write -p 0 0 0x01
ethercat pdo_write -p 0 0 0x02
ethercat pdo_write -p 0 0 0x03
搭配 ecat_coe 例程控制电机,使用 CSV 模式
ethercat pdo_write -p 0 0 0x0f // motor on
ethercat pdo_write -p 0 2 0xFF000000 // change ObjTargetVelocity to 255, hexdata from low byte to high byte
ethercat pdo_read -p 0 // get ObjStatusWord and ObjPositionActualValue
ethercat pdo_write -p 0 0 0x00 // motor off
18.5. API
参考 CherryECAT API :https://cherryecat.readthedocs.io/zh-cn/latest/api.html