1. hpm_motor库使用说明
1.1. 简介
hpm_motor是一个针对电机控制核心算法的库文件,该库旨在通过不断地更新完善,模块化管理具体功能算法;对用户来说不用去关心底层如何实现,加速用户程序开发。
该库目前仅支持在 windows 操作系统下使用。
1.2. 库的添加
1.2.1. 库内容
HPM电机库包含如下内容:
包含函数声明,宏声明,结构体声明的头文件
包含初始化配置函数和实时运行函数的.a文件
一个demo示例,展示HPM MOTOR库使用
文档
1.2.2. 如何添加库
如需使用库里面的一些功能,请先将库添加工程下引用,具体引用流程如下:
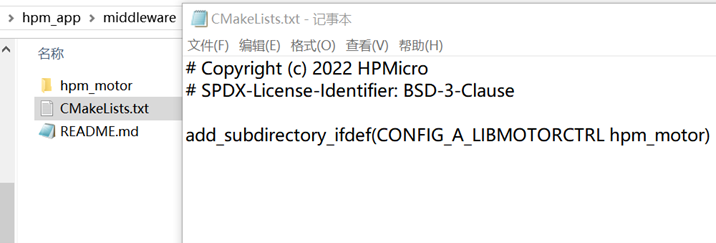
(1)将hpm_motor文件添加到middleware分支下
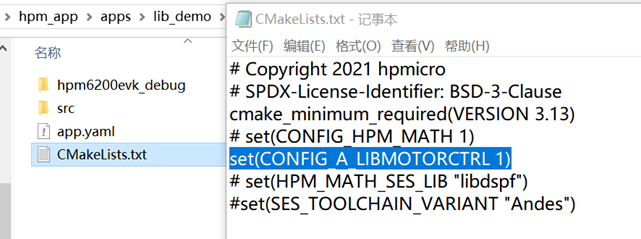
(2)工程引用hpm_motor库
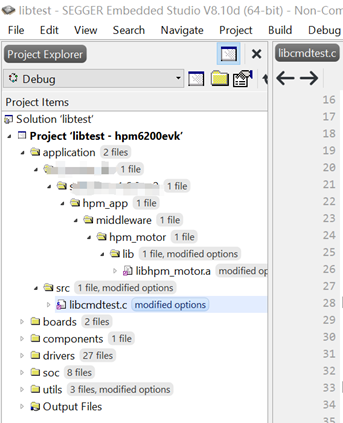
(3)新建工程,打开工程后可以看到hpm_motor库被工程引用
(4)工程编译
这里要说说明一下:hpm_motor 库文件使用,同时支持 gcc 以及 andes 工具链。
1.3. 库功能说明
当前1.0版电机库,支持轨迹规划算法函数接口调用,其他算法功能会迭代更新完善。用户使用之前请先调用版本号函数接口获取版本号,与.a文件显示的版本号核对。
1.3.1. 轨迹规划算法
电机在启停时,速度存在阶跃的情况。电机速度的突变可能会导致电流过载。所以通常用加减速控制算法来规划电机速度。
libhpm_motor.a中使用的轨迹规划算法是S型曲线,其核心是通过可变加加速度大小来控制加速度的变化,保证加速度不突变,使得加减速的速度曲线平滑,以此达到电机平稳运行的目的。
1.3.1.1. 功能简介
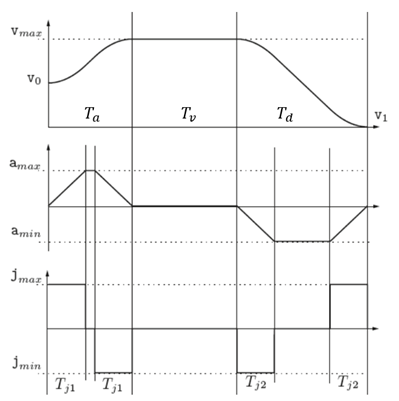
S型曲线主要由加速段(T_a),匀速段段(T_v),减速段(T_d)三大部分组成。加速段又分为加加速(T_j1)、匀加速、减加速(T_j1),减速度段分为加减速(T_j2)、匀减速和减减速(T_j2),一共七段如图1所示,其中,v_max为系统最大加速,v_0为起始速度,v_1为终止速度,a_max为系统最大加速度,a_min为系统最大减速度,j_max为系统最大加加速度,j_min为系统最大减减速度。
1.3.1.2. 接口说明
(1)入口参数
名称 |
说明 |
|
|---|---|---|
轨迹生成配置参数CMDGENE_INPUT_PARA |
CMDGENE_POSCFG_PARA |
位置模式下 |
轨迹生成配置参数CMDGENE_INPUT_PARA |
CMDGENE_VELCFG_PARA |
速度模式下 |
中间变量 |
CMDGENE_USER_PARA |
|
输出变量 |
CMDGENE_OUTPUT_PARA |
位置/速度/加速度/加速度序列 |
(2)结构体成员
结构体 |
描述 |
单位 |
|
|---|---|---|---|
CMDGENE_POSCFG_PARA |
q0 |
起始位置 |
uint |
CMDGENE_POSCFG_PARA |
q1 |
绝对运动位置 |
uint |
CMDGENE_POSCFG_PARA |
v0 |
起始速度 一般设置为0 |
uint/s |
CMDGENE_POSCFG_PARA |
v1 |
终止速度 一般设置为0 |
uint/s |
CMDGENE_POSCFG_PARA |
vmax |
最大速度 |
uint/s |
CMDGENE_POSCFG_PARA |
amax |
最大加速度 |
uint/s/s |
CMDGENE_POSCFG_PARA |
jmax |
最大加加速度 |
uint/s/s/s |
CMDGENE_POSCFG_PARA |
cyclecnt |
往返次数 |
|
CMDGENE_POSCFG_PARA |
cycletype |
运动类型 |
|
CMDGENE_POSCFG_PARA |
dwelltime |
往返停歇时间 |
ms |
CMDGENE_POSCFG_PARA |
isr_time_s |
更新位置序列的中断时间 |
s |
CMDGENE_VELCFG_PARA |
q0 |
起始位置 |
uint |
CMDGENE_VELCFG_PARA |
Tv |
匀速时间 |
s |
CMDGENE_VELCFG_PARA |
v0 |
起始速度 一般设置为0 |
uint/s |
CMDGENE_VELCFG_PARA |
v1 |
终止速度 一般设置为0 |
uint/s |
CMDGENE_VELCFG_PARA |
vmax |
最大速度 |
uint/s |
CMDGENE_VELCFG_PARA |
amax |
最大加速度 |
uint/s/s |
CMDGENE_VELCFG_PARA |
jmax |
最大加加速度 |
uint/s/s/s |
CMDGENE_VELCFG_PARA |
isr_time_s |
更新位置序列的中断时间 |
s |
CMDGENE_OUTPUT_PARA |
poscmd |
位移指令 |
uint |
CMDGENE_OUTPUT_PARA |
velcmd |
速度指令 |
uint/s |
CMDGENE_OUTPUT_PARA |
acccmd |
加速度指令 |
uint/s/s |
注:单位uint一般为r,count
(3)函数接口
函数接口名称 |
说明 |
调用状态 |
|---|---|---|
pos_cmd_gene |
位置模式下,位置/速度序列更新 |
中断函数内调用 |
vel_cmd_gene |
速度模式下,速度序列更新 |
中断函数内调用 |
cmd_gene_disable |
轨迹规划重置 |
轨迹规划结束后重置 |
1.3.1.3. 使用方法
轨迹规划算法分为五步:
Step1:添加库头文件。C头文件“libhpm_motor.h”包含库使用的函数声明和结构体声明。在主C文件的顶部添加以下行:
#include “libhpm_motor.h”
.h文件在hpm_app\middleware\hpm_motor\inc下。
Step2:在”{ProjectName}-Main.c”文件中定义轨迹规划结构体全局变量。
CMDGENE_PARA cmdpar=0;
Step3:用户根据运行模式,运动方式,运动参数对配置参数结构体的各成员赋值
cmdpar.cmdgene_in_par.poscfgpar.q0 = 0;
cmdpar.cmdgene_in_par.poscfgpar.q1 = 20;
cmdpar.cmdgene_in_par.poscfgpar.v0 = 0;
cmdpar.cmdgene_in_par.poscfgpar.v1 = 0;
cmdpar.cmdgene_in_par.poscfgpar.vmax = 10;
cmdpar.cmdgene_in_par.poscfgpar.amax = 100;
cmdpar.cmdgene_in_par.poscfgpar.jmax = 1000;
cmdpar.cmdgene_in_par.poscfgpar.cyclecnt = 1
cmdpar.cmdgene_in_par.poscfgpar.cycletype = 0;
cmdpar.cmdgene_in_par.poscfgpar.dwelltime = 500;
cmdpar.cmdgene_in_par.poscfgpar.isr_time_s = 1;
cmdpar.cmdgene_in_par.velcfgpar.q0 = 0;
cmdpar.cmdgene_in_par.velcfgpar.Tv = 5;
cmdpar.cmdgene_in_par.velcfgpar.v0 = 0;
cmdpar.cmdgene_in_par.velcfgpar.v1 = 0;
cmdpar.cmdgene_in_par.velcfgpar.vmax =10;
cmdpar.cmdgene_in_par.velcfgpar.amax = 100;
cmdpar.cmdgene_in_par.velcfgpar.jmax = 1000;
cmdpar.cmdgene_in_par.velcfgpar.isr_time_s = 1;
Step4:根据运行模式在中断内分别调用对应轨迹规划函数
速度模式下,调用函数vel_cmd_gene
位置模式下,调用函数 pos_cmd_gene
Step5:轨迹规划重置
cmd_gene_disable
调用该函数重置轨迹规划中间变量,以便再次对用户指定的PTP运动的起点,终点,速度规划算法。
1.3.1.4. 配置示例
为了方便大家更快捷的对此功能了解使用,这里记录了一些基础配置下速度曲线,位置曲线供大家参考,具体如下表所示。
运行模式 |
绝对位置r |
速度r/s |
加速度r/s/s |
加加速度r/s/s/s |
匀速时间s |
运动模式 |
运行次数 |
中断 |
示意图 |
|---|---|---|---|---|---|---|---|---|---|
速度 |
0 |
10 |
100 |
1000 |
10 |
/ |
/ |
1ms |
图1 |
速度 |
0 |
10 |
10 |
100 |
10 |
/ |
/ |
1ms |
图2 |
位置 |
20 |
10 |
100 |
1000 |
/ |
0:连续 |
/ |
1ms |
图3 |
位置 |
20 |
10 |
100 |
1000 |
/ |
1:单次 |
/ |
1ms |
图4 |
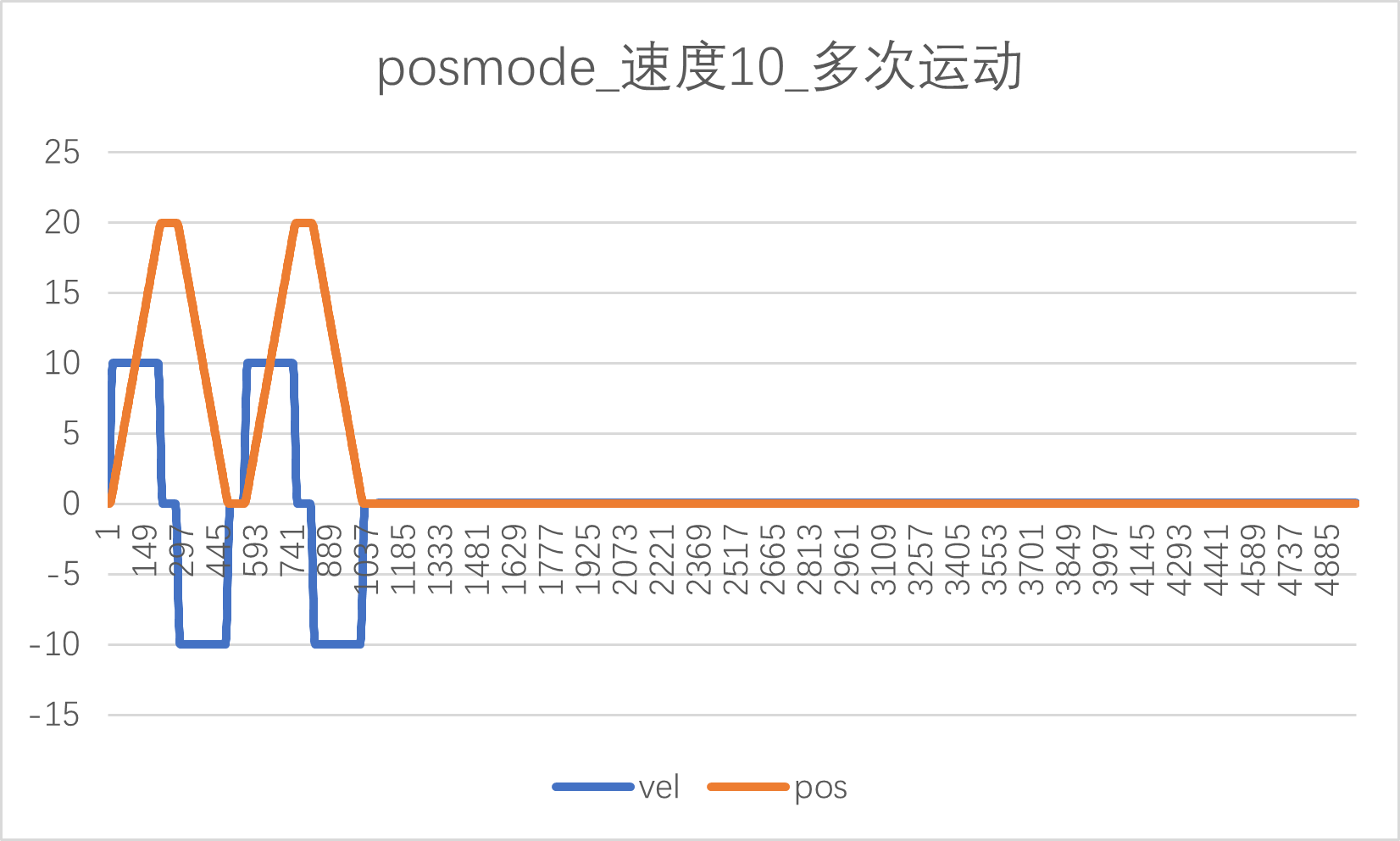
位置 |
20 |
10 |
100 |
1000 |
/ |
2:多次 |
2 |
1ms |
图5 |
图1
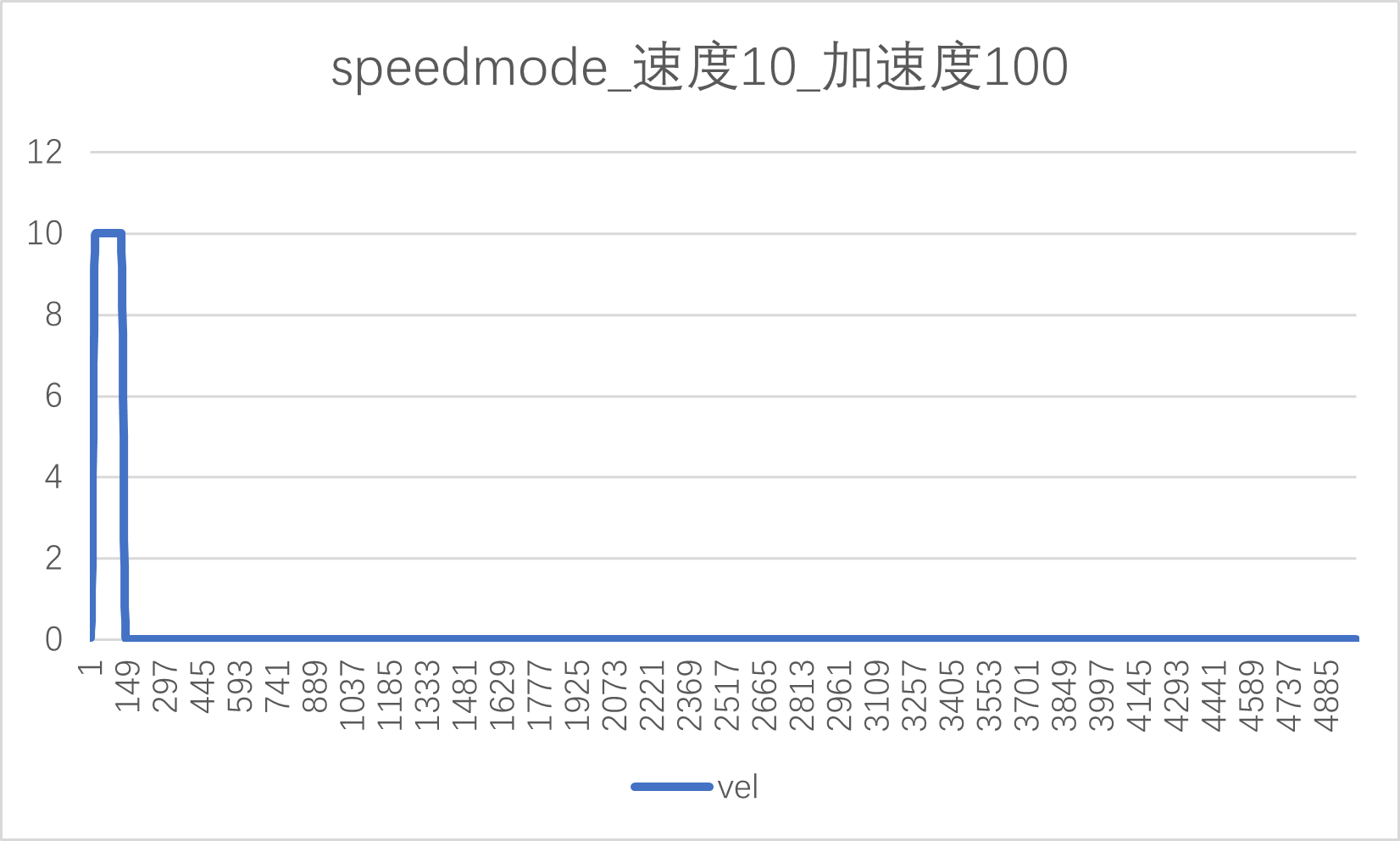
图2
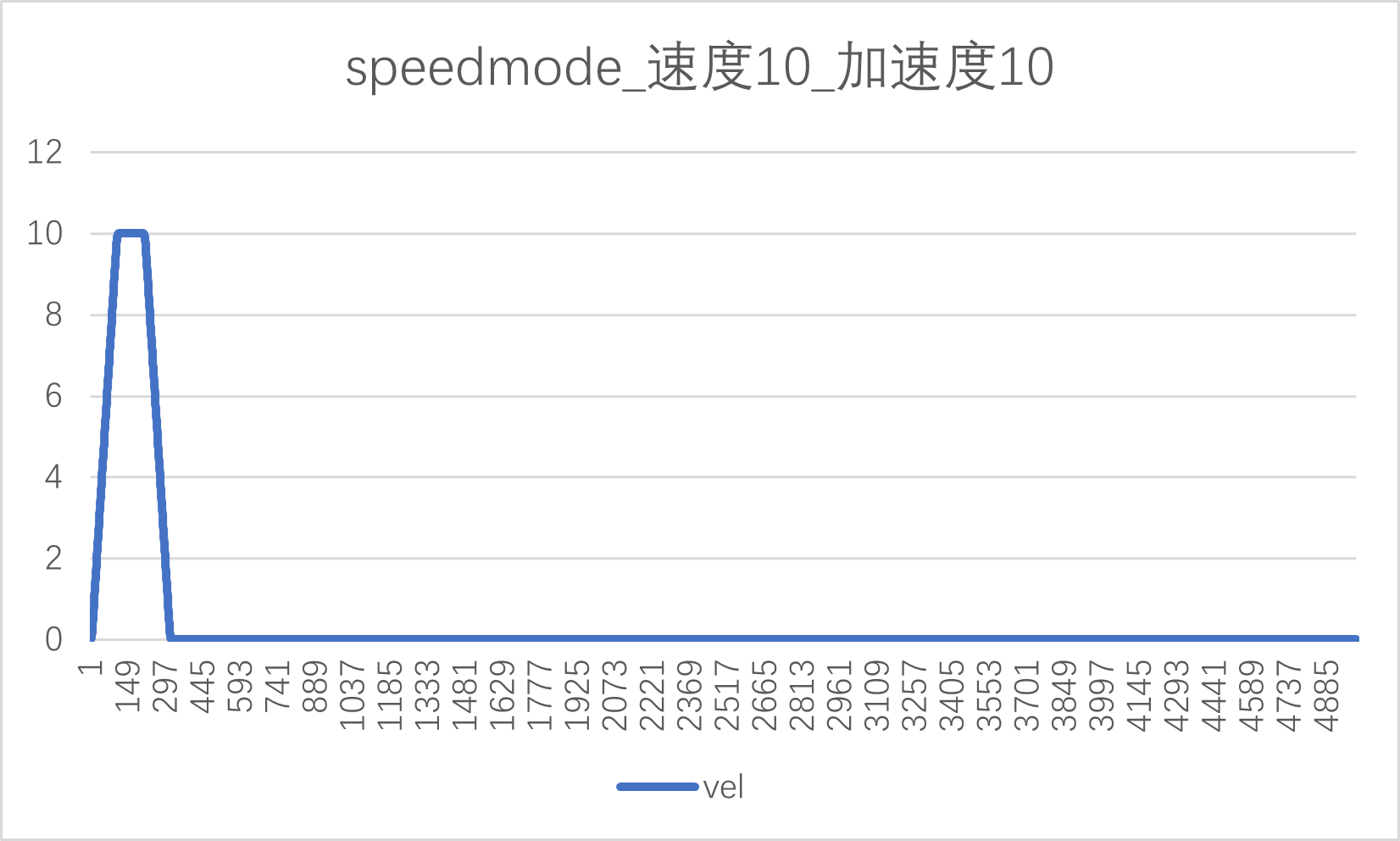
图3
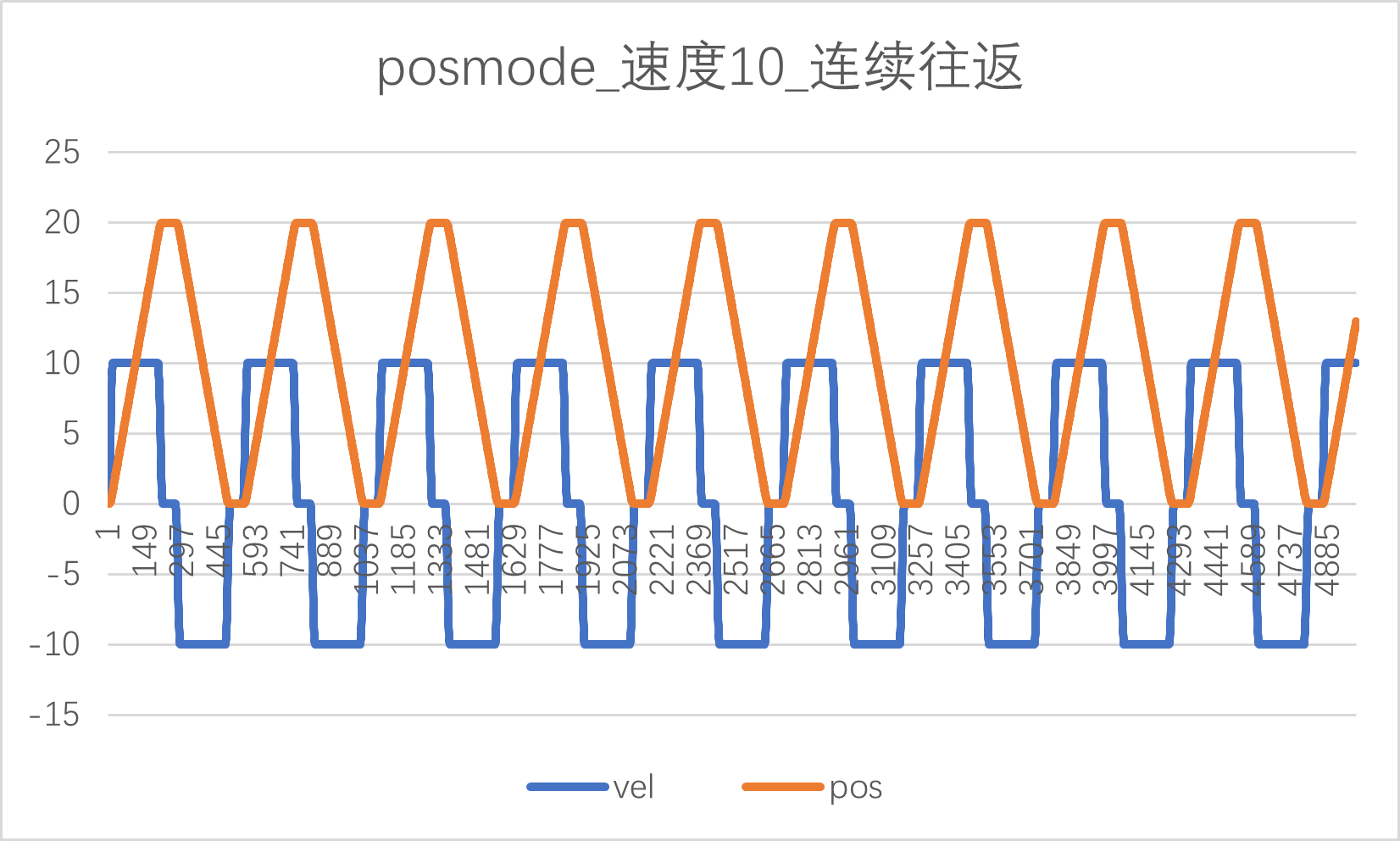
图4
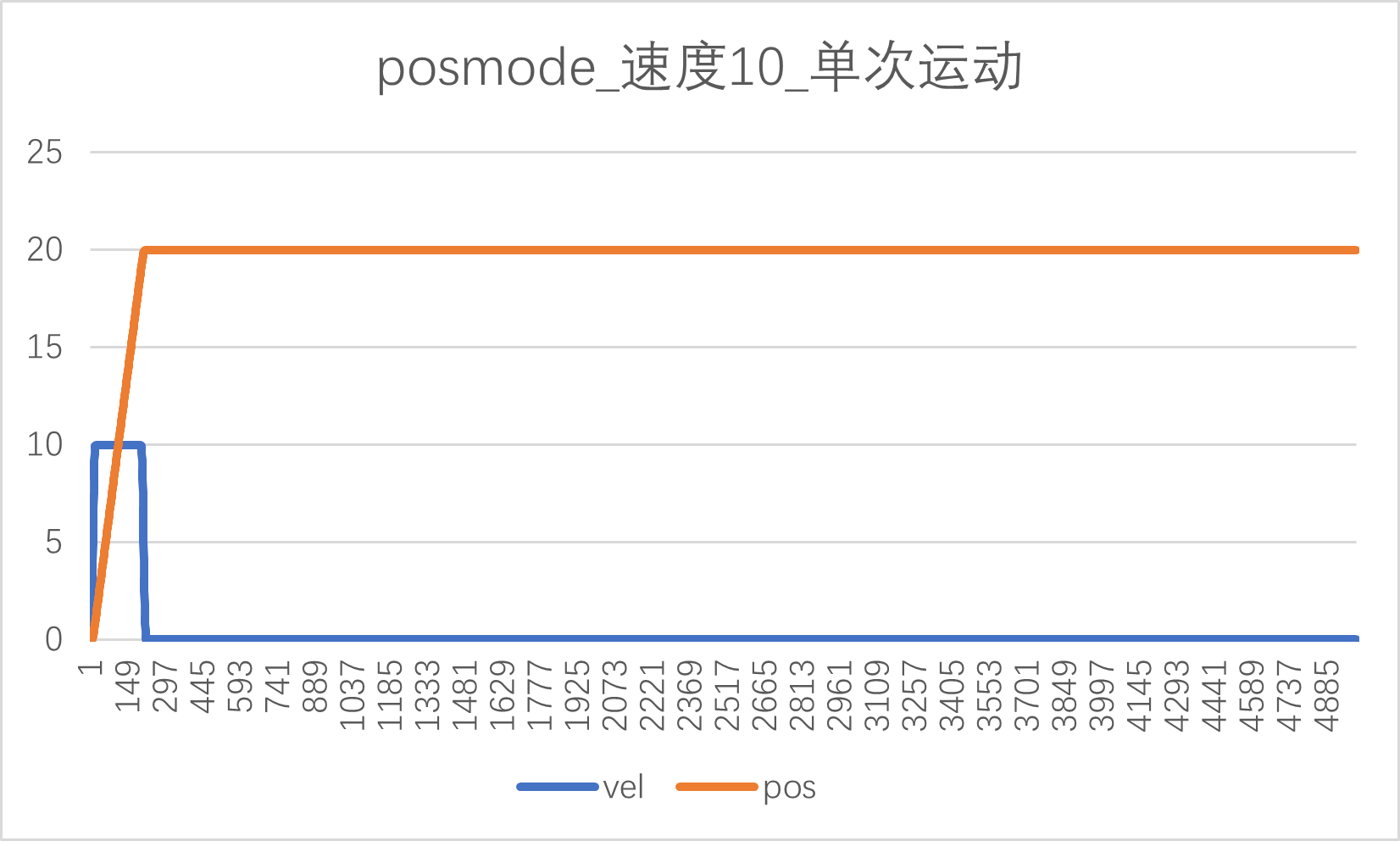
图5
1.3.2. 惯量辨识算法
为达到伺服控制系统的良好动静态特性,需要辨识出转动惯量,对系统控制参数进行调整。本库主要是为了说明惯量辨识原理、实现方式,原理请查看:《hpm_motor库使用说明2.0》
该库函数使用步骤: 1、使用前,电机需要设置为速度模式,需要对INTERIA_CalHdl的相关变量赋值: INTERIA_CalHdl.INTERIA_InObj.flux = 永磁磁链幅值;//单位Wb
INTERIA_CalHdl.INTERIA_InObj.vel1 = 0.0000167*第一加速阶段最大速度(单位,r/min);//可设置为350r/min
INTERIA_CalHdl.INTERIA_InObj.cycle = 10;//辨识过程一共10次连续加减速
INTERIA_CalHdl.INTERIA_InObj.interia_start = 1;//1:启动惯量辨识,0:不启动惯量辨识
INTERIA_CalHdl.INTERIA_InObj.kk = 4;//第二阶段的加速度是第一阶段加速度的KK倍
INTERIA_CalHdl.INTERIA_InObj.step = 500;//单位ms,每段加速时间500ms
INERTIA_CalObj.INTERIA_InObj.iq = 三相永磁同步电机Q轴反馈电流;//单位:A
INERTIA_CalObj.INTERIA_InObj.speed_fdk = 反馈速度;//单位,r/s
INERTIA_CalObj.INTERIA_InObj.poles = 三相永磁同步电机极对数;//
2、函数调用:interia_cal_process(&INERTIA_CalObj);
3、指令速度 = INERTIA_CalObj.INTERIA_UserObj.Vel_out*1000;//单位r/s
4、惯量结果存放变量:INTERIA_CalHdl->INTERIA_OutObj.J,单位(𝑘𝑔 ∙ 𝑚2)。//前提是惯量辨识已经结束,即INERTIA_CalObj.INTERIA_OutObj.status = 0。