In order to facilitate users to use and understand the functions of the motor library, a test demo is set up for the motor library.
Version 1.0 of the library contains only trajectory planning algorithms.
{
gptmr_channel_config_t config;
config.debug_mode = 0;
}
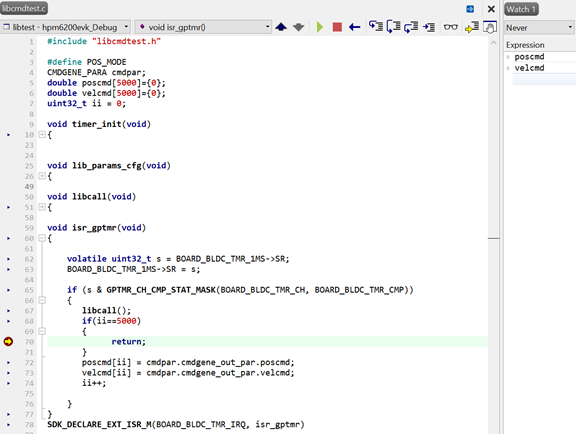
void timer_init(void)
timer init ;定时器初始化
Definition: libcmdtest.c:13
#define BOARD_BLDC_TMR_IRQ
Definition: libcmdtest.h:12
#define BOARD_BLDC_TMR_MS
Definition: libcmdtest.h:9
#define BOARD_BLDC_TMR_CH
Definition: libcmdtest.h:10
#define BOARD_BLDC_TMR_RELOAD
Definition: libcmdtest.h:13
#define BOARD_BLDC_TMR_CMP
Definition: libcmdtest.h:11
cmdpar.cmdgene_in_par.poscfgpar.q0 = 0;
cmdpar.cmdgene_in_par.poscfgpar.v0 = 0;
cmdpar.cmdgene_in_par.poscfgpar.v1 = 0;
cmdpar.cmdgene_in_par.velcfgpar.q0 = 0;
cmdpar.cmdgene_in_par.velcfgpar.v0 = 0;
cmdpar.cmdgene_in_par.velcfgpar.v1 = 0;
#define MOVE_SPEED
user define motor move speed ;运动速度,单位:r/s
Definition: libcmdtest.h:26
#define ISR_TIME_S
set isr time ;更新位置/速度序列的中断时间,与定时器中断时间保持一致,单位:s
Definition: libcmdtest.h:57
#define MOVE_ACC
user define motor move acc ;运动加速度,单位:r/s/s
Definition: libcmdtest.h:31
#define CYCLE_CNT
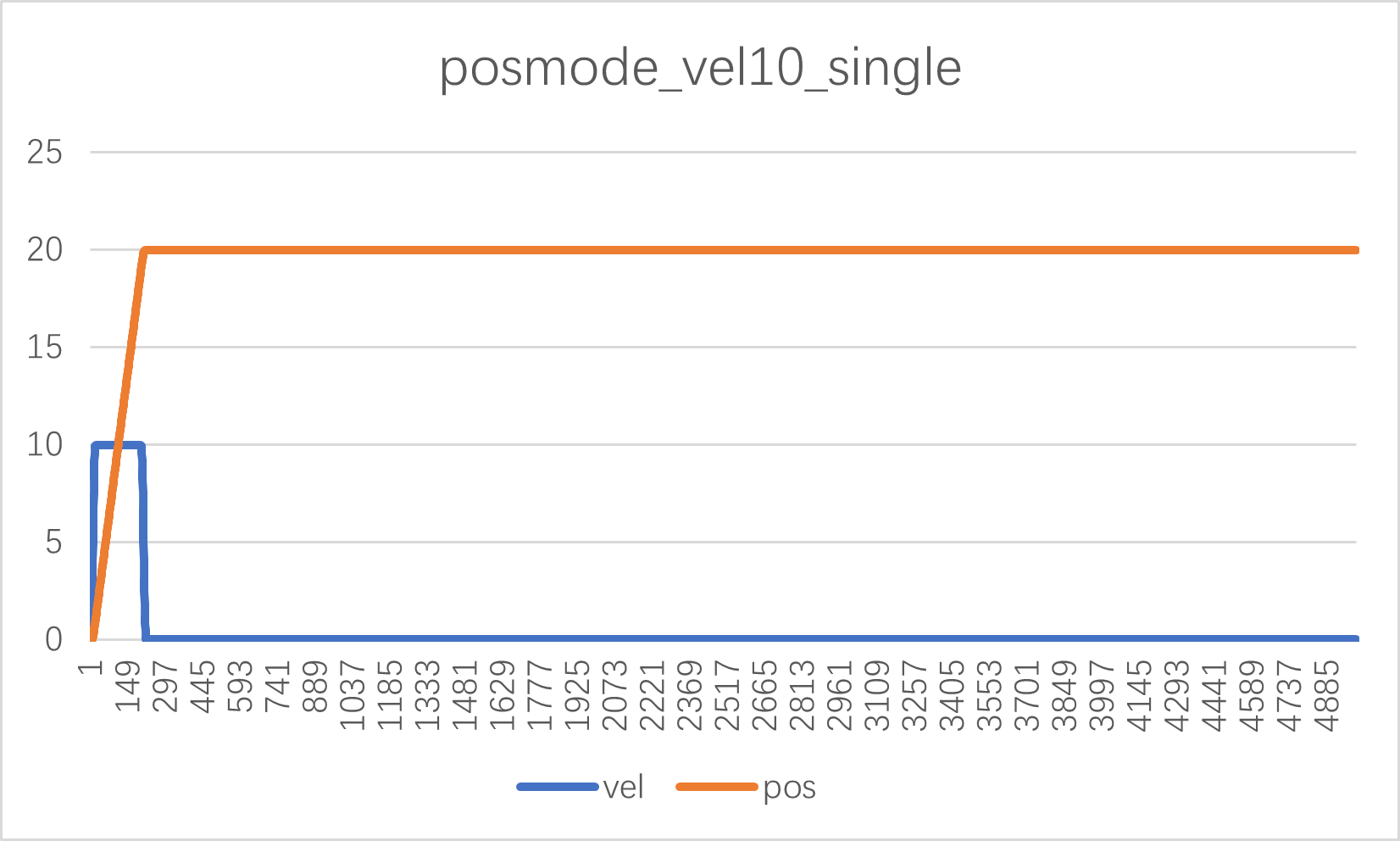
user define motor move cycle count ;位置模式下,电机轴往返运动次数
Definition: libcmdtest.h:46
#define DWELLTIME_MS
user define motor dwell time ;位置模式下,运行相对位置后轴停止时间,单位:ms
Definition: libcmdtest.h:52
@ MULTIPLE_MOVE_TYPE
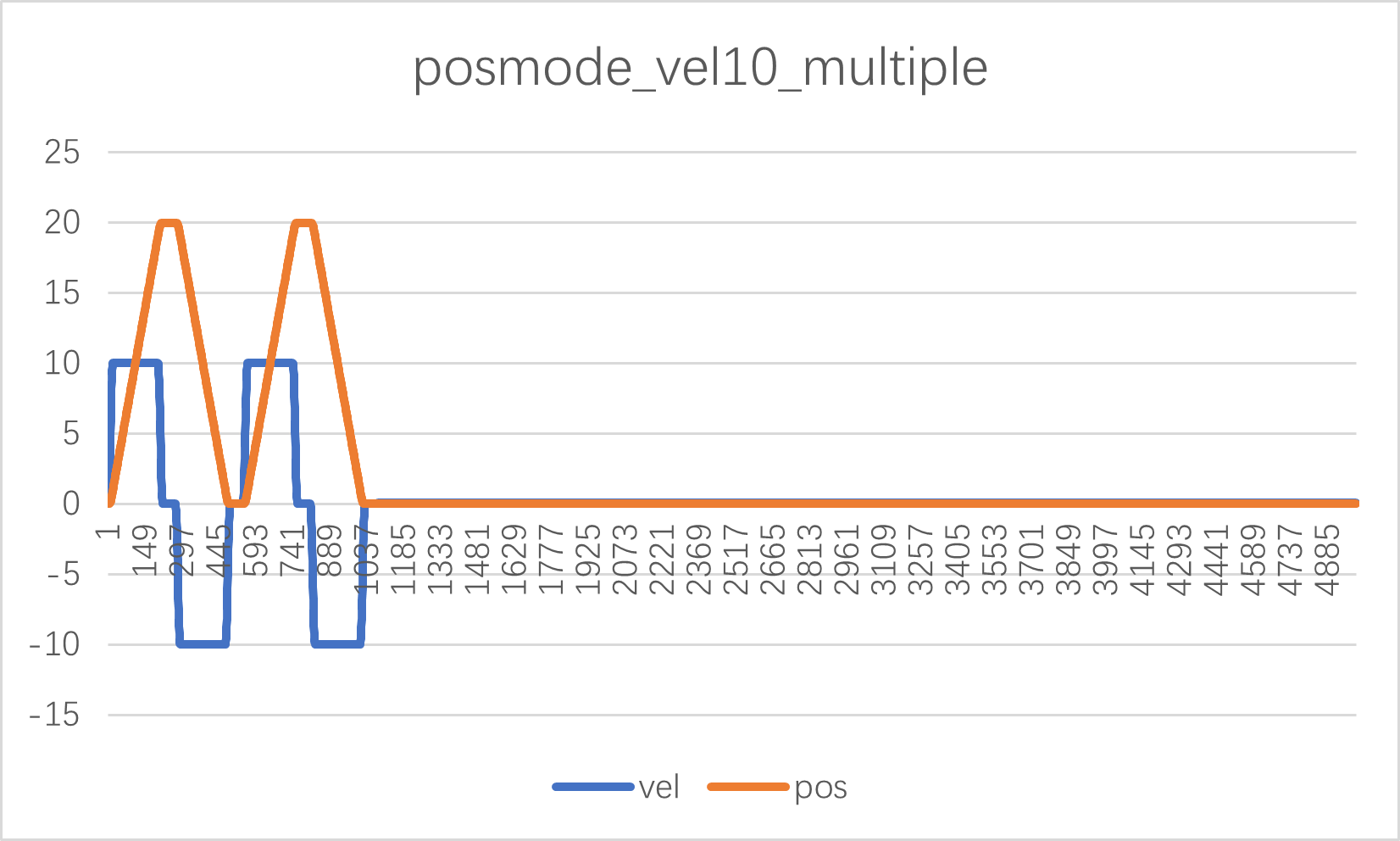
user define motor in multiple move type ;位置模式下,电机轴以多次往返模式运动
Definition: libcmdtest.h:74
#define CONSTANT_SPEED_TIME_S
user define motor move time with constant speed ;速度模式下,匀速运动时间,单位:s
Definition: libcmdtest.h:41
#define MOVE_BASOLUTE_POS_R
user define motor relative position ;相对运动距离,单位:r
Definition: libcmdtest.h:21
#define MOVE_JERK
user define motor move jerk ;运动加加速度,单位:r/s/s/s
Definition: libcmdtest.h:36